
Tuning a servo system is a complex and iterative process. It typically requires tuning multiple control loops, each with its own gains (proportional, integral, and/or derivative) to be adjusted. In addition, tuning a servo drive usually requires adjustments to additional parameters including acceleration and velocity feed-forward gains and filters to reduce oscillations.
While manual tuning has been the predominant method for many years, most servo drives now incorporate functions that will automatically tune the system. Although in the beginning, auto-tuning functions were useful only when the load was rigidly coupled and the system dynamics were relatively simple, more complex algorithms and faster computing power have enabled the development of auto tuning functions that are sophisticated enough to address even the most complex systems, with minimal input or effort from the user.
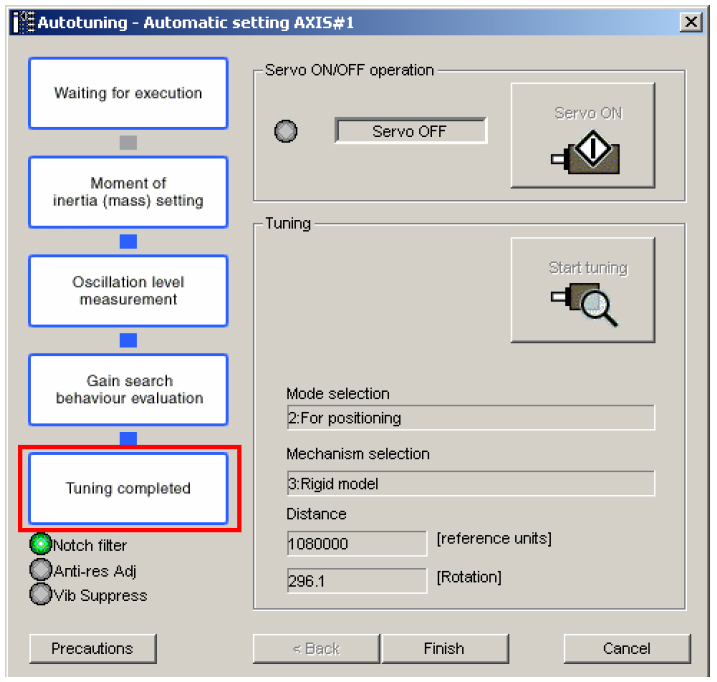
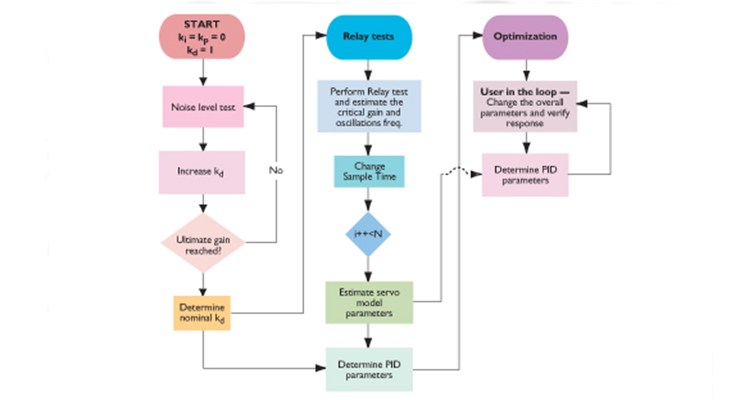
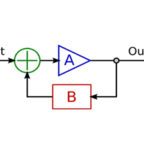
Auto tuning is based on the same principles as manual tuning. That is, the performance of the motor is evaluated relative to a given command, and the servo drive automatically adjusts the gains until values are found that give the best performance. In most cases, the auto tuning process can also add filters to the control loop to suppress oscillations caused by resonance frequencies in the system.
Adaptive tuning is similar to auto tuning, but goes one step further and allows for a wide range of parameters that will provide stable control of the servo system. Adaptive tuning continuously monitors the system’s performance and, if necessary, adjusts the control loop gains and filter parameters to compensate for unknown or changing load conditions during the system’s operation. The key to adaptive tuning is that it runs continuously in the background of the control system to detect resonances by analyzing the frequency response of the torque loop.
To see (and hear) a linear system with poor servo tuning, and how it can be corrected with a simple auto-tuning procedure, check out this video from Bosch Rexroth.
One-parameter tuning typically refers to a tuning feature that can be used to fine tune the system’s response after adaptive tuning has been configured.
The term one-parameter tuning comes from the fact that a single parameter is used to configure multiple system attributes — including gains, filters, friction compensation, and control of resonance.
In some programs, one-parameter tuning lets the design engineer manually adjust filters and gains as a way to more finely tailor machine response (after initial tuning) to various conditions and events. Several separate parameters can be optimized with a single value adjustment; separate modes can target responsiveness, stability, or things such as position-overshoot suppression.
Here, some programs also allow setting of machine resonance filters to complement the specific machine assembly at hand. Then notch filters help minimize operation at or excitation of machine resonant frequencies — which in turn improve servo stability, responsiveness, settling time, and overall system efficiency. ⚙️ Article updated August 2019.

Leave a Reply
You must be logged in to post a comment.