

Selecting a gearbox goes beyond just determining the required speed and torque output. Duty cycle, radial and axial loads, inertia, and environment all play a factor. Not to mention the gearbox type (inline, right angle), precision level, and service factor. Properly sizing and selecting a gearbox requires consideration of all these criteria, but with numerous […]
FAQs + basics
Which drive-based safety functions can I use for a controlled stop?

Safe Torque Off (STO) is the most basic of the drive-based safety functions, producing an uncontrolled stop, in accordance with the standard EN/IEC 60204-1. The STO function is suitable for systems with low inertia or high friction that will stop in a relatively short amount of time when power is removed from the motor, and when […]
What are IEC 61131-3 and PLCopen?
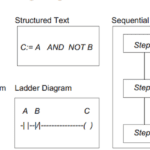
The IEC (the International Electrotechnical Commission) is an international standards organization that publishes electrical and electronic standards. Hundreds of them, in fact; standardizing everything from letter symbols in electronics to medical equipment and railroad communication and signaling. Specifically, IEC 61131-3 is the standard for “Industrial-process measurement and control – programmable controllers.” It sets standards for […]
What is a rotary indexing table?

Rotary indexing is a process where repeated angular displacement during a machine cycle is followed by motionless dwell. A rotary indexing table is specifically designed to make repetitive moves around a platform. Essentially, they are highly precise work-positioning devices that index parts to be worked or machined in multiple operations. A rotary indexing table is an […]
How do STO inputs affect SIL3/PLe conformity for AC drives?

Safe Torque Off, or STO, is a drive-based safety function that stops the drive from providing power to the motor, without interrupting power to the drive. Activating the STO function produces an uncontrolled stop, meaning the motor coasts to a stop based on the system’s inertia and friction. The STO function also prevents an unexpected […]
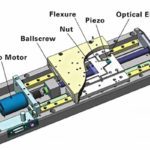
What kind of feedback do piezo motors use?

Piezo motors are known for their extremely small size and high size-to-torque ratio, as well as high-resolution movements (micrometer and even nanometer-level resolution.) The high resolution is attributable to the inherent design of piezo motors themselves, but feedback also helps to ensure highly accurate movement on the order of nanometers. As a general rule, piezo […]
What is state space control?
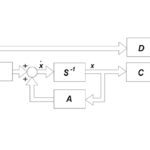
If you design, install, or troubleshoot motion control systems, you’re probably familiar with PID (proportional-integral-derivative) control, which uses feedback to detect errors between the desired position and the actual position and applies corrective commands to compensate for those errors. Although PID control is the most common type of industrial controller, it does have limitations. First, […]
What are servo drive loops?
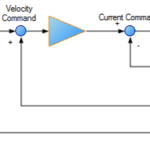
Servo drives, also called amplifiers in the motion-control industry, take a command signal for position, velocity, or current and adjust the voltage and current applied to the servomotor based on closed-loop feedback. In fact, a servo drive is just one element of a motion control system, which includes a servo motor, the drive, controller, and […]
Can piezo motors and electric motors be combined?
Piezo motors and electric motors are employed for very different uses. Piezo motors provide a high power-to-size ratio for very small movements – typically a few millimeters or less. They also have very fast response times and are self-locking, meaning they can hold a load in position during a power-off condition. Electric motors, on the […]
Do piezo motors need specialty PID loops or controls?
The simple answer is, not necessarily. Not every piezo motor requires a PID control loop. However, most piezo motors operate closed-loop with some type of feedback, and PID control is only one possibility, but it is common and effective in controlling piezo motors. Some piezo motor applications can and do run open loop, although piezo […]