
Piezo elements are used in a variety of configurations to provide rotary or linear motion in applications that require short strokes and fast response times. Piezo elements that are used to produce motion through the inverse piezoelectric effect are known as piezo actuators. These devices provide very small displacements with extremely high resolution. When one or more piezo elements are combined, the assembly is commonly referred to as a piezo motor. Piezo motors require more sophisticated drive electronics, but can provide longer travel lengths than piezo actuators.
Depending on the arrangement of the piezo elements and the type of movement they generate, piezo actuators can generally be grouped into four main types: longitudinal, shear, tube, and contracting. Despite their different configurations and uses, these piezo actuators all operate on the same basic principle: movement is directly proportional to the voltage applied. Because they operate solely on the solid-state dynamics of the piezoelectric material, with no mechanical parts, piezo actuators do not experience wear.
A piezo actuator can be integrated with frictionless flexures and levers to form a flexure guided piezo actuator. The flexures and levers multiply and translate the motion of the piezo stack to provide travel up to a few mm, in one or multiple axes. Because the motion of the flexures is based on elastic deformation of the material, there is no friction and no wear.
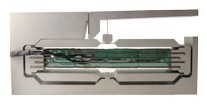
Image credit: Dynamic Structures and Materials, LLC
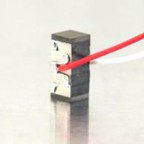
Unlike piezo actuators, piezo motors typically incorporate mechanical elements to produce motion, which makes them susceptible to wear. Take ultrasonic piezo motors for example. They operate by electrically exciting a piezo actuator to produce high-frequency oscillations. The actuator is preloaded against a runner via a coupling element. Although the motion (oscillation) of the actuator does not create wear, the interface between the coupling and the runner presents a source of friction, and therefore, wear.
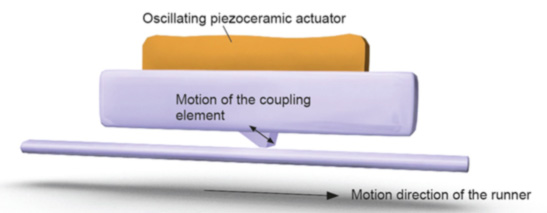
Image credit: Physik Instrumente GmbH
Piezo inertia motors – also referred to as “stick-slip” motors – also use a piezo actuator and runner to produce motion. But in this case, the actuator expands slowly and contracts rapidly. Through a coupling element, the runner is able to move along with the actuator during expansion, but during the rapid contraction, the runner slips on the coupling and effectively stays in place. For rotary motion, a variation on this design uses “jaws” that engage with a very fine thread screw and turns the screw as the actuator expands. In either design, the reliance on friction and the “stick-slip” effect makes wear inherent in piezo inertia motors.
Image credit: Thorlabs, Inc.
A piezo motor design with little or no wear is the piezo stepper motor. Piezo steppers consist of multiple piezo actuators and operate by coordinating clamping and shear motions between the actuators and a runner. Unlike other piezo motor designs, because each of the actuators (also referred to as “legs” due to their walking-type motion) in a piezo stepper motor make contact and then lift off of the runner, friction is minimized and wear is virtually eliminated.

Image credit: MICROMO


Leave a Reply
You must be logged in to post a comment.