
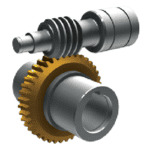
Worm gears are found in industrial applications, heavy equipment, and even consumer applications. Although their efficiency is relatively low, they can provide very high reduction ratios and, in many cases, are self-locking. Worm gears are constructed of a worm and a gear (sometimes referred to as a worm wheel), with non-parallel, non-intersecting shafts oriented 90 […]
Hypoid gearboxes: What are they and where are they used?

Hypoid gearboxes are a type of spiral bevel gearbox, with the difference that hypoid gears have axes that are non-intersecting and not parallel. In other words, the axes of hypoid gears are offset from one another. The basic geometry of the hypoid gear is hyperbolic, rather than having the conical geometry of a spiral bevel […]
How to address overshoot in servo control
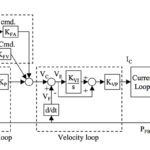
Updated August 2018 || There are three characteristics that indicate when a servo system is properly tuned: response time, settling time, and overshoot. Response time is the time it takes the system to reach a specified percentage of the target value, while settling time is the time it takes for the target value to be […]
Which piezo motor types experience wear?
Piezo elements are used in a variety of configurations to provide rotary or linear motion in applications that require short strokes and fast response times. Piezo elements that are used to produce motion through the inverse piezoelectric effect are known as piezo actuators. These devices provide very small displacements with extremely high resolution. When one […]
Hybrid linear stepper motors: Operation and applications

Like servo motors, stepper motors are available in both rotary and linear designs. When an application requires force (rather than torque) output and can operate in open loop control, a linear stepper motor is often the preferred solution. Although linear stepper motors are available in both variable reluctance and hybrid designs, the more common version is […]
Why is resonant frequency important in piezo applications?
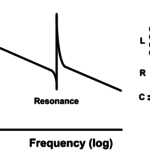
Resonance occurs when the resonant frequency (also referred to as the natural frequency) of an object or system is equal or very close to the frequency at which it is being excited. This causes the object or system to vibrate strongly and can result in unexpected – and sometimes catastrophic – behavior. When one oscillating object or system (a […]
How do switched reluctance motors differ from stepper motors?

Switched reluctance motors operate by switching currents in the stator windings in response to changes in the magnetic circuit formed by the rotor and stator. The stator of a switched reluctance motor contains windings, similar to a brushless DC motor, but the rotor is simply made of steel that is shaped into salient poles, with […]
7 linear motion principles that electrical engineers should know

Electrical and controls engineers are normally tasked with selecting and integrating the electronic components that go into a motion control system, such as motors, drives, controls, feedback devices, and HMIs. In doing so, their primary concerns tend to be on making the various components communicate with each other, working through complex equations for drive tuning, […]
How notch filters and low-pass filters reduce resonance in servo systems

Servo systems experience resonance due to compliance or backlash in mechanical components such as gearboxes, screw drives, and couplings. Resonance reduces system performance, can cause audible noise, and in extreme cases can even damage hardware. Servo tuning is the process of setting controller gains to optimize servo performance, but as gains are increased, resonances typically […]
Four laws of electromagnetism that you should know
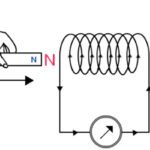
The operation of electric motors is governed by various laws of electricity and magnetism, including Faraday’s law of induction, Ampère’s circuital law, Lenz’ law, and the Lorentz force. The first two – Faraday’s law and Ampère’s circuital law – are included in Maxwell’s equations. Together with Lenz’ law and the Lorentz force, these principles form […]