
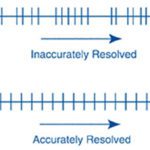
Encoders are at the heart of any closed loop servo system, providing feedback to the controller, which uses this information to determine if the motor reached the commanded position or velocity. Thus, encoder resolution and accuracy are essential to the proper operation of a closed-loop system. Resolution is the distance over which a single encoder […]
How are encoders used for speed measurement?
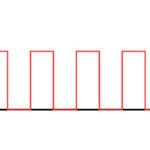
The most common use for encoders is to measure angular or linear distance, but encoders can also be used to perform speed or velocity measurements. This is possible because there is a linear relationship between an encoder’s pulse frequency and its rotational velocity. In other words, as the encoder rotates faster, the pulse frequency increases […]
How are complementary signals used to mitigate encoder noise?
Electrical noise is a common problem that occurs during the transmission of an incremental encoder’s signal to the receiving electronics, especially when the cable lengths are very long. Stray electromagnetic fields or currents induce unwanted voltages into the signal. These voltages can cause the receiver to make false counts, producing errors in the position or […]
What is a wound rotor motor?

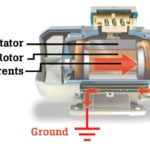
A wound rotor motor is a variation of the three-phase induction motor, designed to provide high starting torque for loads with high inertia, while requiring very low current. Wound rotor motors are also referred to as “slip ring motors.” The stator of a wound rotor motor is the same as a typical induction motor, but […]
What is linear behavior for DC motors?
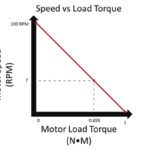
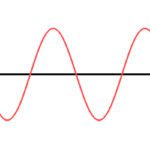
When the term “linear behavior” is used to describe a system, it implies that the system’s output is directly proportional to the input. Unlike their wound-field counterparts, permanent magnet DC (PMDC) motors exhibit linear behavior. The use of permanent magnets means PMDC motors don’t need separate field excitation, and therefore, don’t experience the electrical losses […]
What are auto-tuning methods for servo drives?

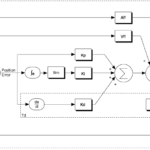
Tuning a servo system is a complex and iterative process. It typically requires tuning multiple control loops, each with its own gains (proportional, integral, and/or derivative) to be adjusted. In addition, tuning a servo drive usually requires adjustments to additional parameters including acceleration and velocity feed-forward gains and filters to reduce oscillations. While manual tuning […]
Where are digital servo drives used?
The original servo drives are analog types that operate on ±10-Volt inputs. In contrast, digital servo drives operate over fieldbus networks that now dominate the market. The primary difference in construction between digital and analog drives is that a digital drive includes a microprocessor to carry out computations — in turn to determine the output […]
Where are analog servo drives used?
The purpose of a servo drive is to convert low-power signals from the controller to high-power signals to the motor, instructing it to produce the desired torque or velocity. Servo drives (also referred to as servo amplifiers) can operate on either analog or digital input signals. Analog servo drives receive ±10-Volt analog signals from the […]
Electric motor fluting: What is it and what causes it?
Variable frequency drives convert AC input voltage to DC, and then back to pulse-width-modulated AC voltage with variable frequency. These AC voltage pulses are controlled by insulated gate bipolar transistors (IGBTs). IGBTs have a fast switching time (also referred to as “rise time” or “dv/dt”—rate of change of voltage over time), which reduces energy losses […]
How are servo system velocity control loops tuned?
Servo systems typically use a combination of three types of control loops: current, velocity, and position. The velocity control loop serves two purposes—it enables the system to respond to changing velocity commands, and it allows the system to resist high-frequency load disturbances. But the velocity loop by itself can’t ensure that the system maintains a […]