

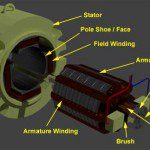
DC motors are constructed with two major parts: the rotor and the stator. The rotor has a ring-shaped iron core with slots that hold coils, or windings. Following Farady’s law, when the core is rotated in a magnetic field, a voltage, or EMF, is induced in the coils. This induced EMF causes current to flow, […]
Scott Jordan Named Head of Photonics by PI

PI (Physik Instrumente), a leading provider of photonics alignment, nanopositioning, and precision motion control systems has appointed Scott Jordan as Head of the Photonics Market Segment. Jordan, a PI Fellow, holds a Bachelor of Science degree and Master of Science degree, both in Physics, from University of California, Irvine and an MBA in Finance and […]
FAQ: What is the Swinburne test for DC motors?
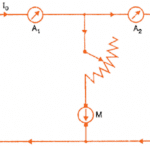
The Swinburne test is an indirect method for determining the efficiency of DC motors. It works by finding the no-load losses experimentally and then estimating additional losses from the rated motor data. From this information, the efficiency can be determined at any applied load. First, the no-load current and shunt field current are obtained directly […]
FAQ: What are rotational losses in DC motors?
DC motors, like all machines, experience some losses when converting electrical power to mechanical power. (Note that in generators, mechanical power is converted to electrical power, but the losses experienced are the same.) While there are several ways in which manufacturers and experts group losses, one common method is to divide them into five categories: mechanical, […]
What is distributed architecture for servo drives?

Article updated August 2019 || Traditional servo-system architecture consists of a power supply, a motion controller, and servo drives all housed in one location that is typically a control cabinet located away from the machine. Then each motor connects to the control cabinet by two cables … one for power and one for feedback. This […]
What is a servo drive?

Updated August 2019 || Servo systems consist of four main components — a motor, a drive, a controller, and a feedback device … with the latter usually an encoder. The controller determines what the motor must do and then triggers the drive to send the necessary electrical energy to the motor to make the required […]
FAQ: How can brush wear in DC motors be minimized?
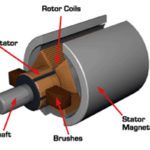
Brushed DC motors provide high speed and torque, are simple to operate, and are generally inexpensive. But one characteristic that is often viewed as a drawback is brush wear, which can necessitate frequent maintenance and downtime, and in extreme cases, can result in motor failure. Brushed DC motors are commutated mechanically, through the use of a commutator […]
FAQ: What is sinusoidal commutation for dc motors?
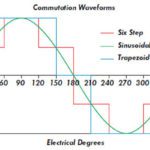
Although the back EMF waveform of a brushless DC (BLDC) motor is theoretically trapezoidal, in reality, inductance in the motor smooths the back EMF into a more sinusoidal shape. This is why BLDC motors can use either trapezoidal or sinusoidal commutation methods. While trapezoidal commutation is the simpler of the two methods, it produces significant […]
FAQ: What is electronic gearing for servo motors?
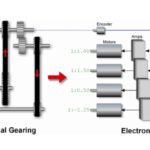
Gears are often used to establish a fixed speed relationship between a motor and a drive system (such as a ball screw, rack and pinion, or belt and pulley system). For example, when a belt and pulley system is connected to a motor through a 3:1 gearbox, each full rotation of the motor causes the […]
FAQ: Why are starters used with DC motors?

Starters are used to protect DC motors from damage that can be caused by very high current and torque during startup. They do this by providing external resistance to the motor, which is connected in series to the motor’s armature winding and restricts the current to an acceptable level. To see why DC motors experience high […]