
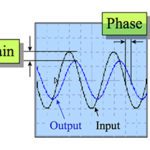
For a system driven by sinusoidal inputs, such as a servo motor, frequency response is a measure of the amplitude and phase of the output signal relative to the input signal. It is a useful estimate of the limits of servo tuning that will produce a stable system without oscillation. To determine frequency response, a sinusoidal input […]
Field oriented control vs. sinusoidal commutation
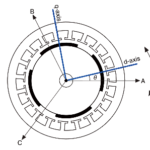
Brushless AC (BLAC) motors are driven with sinusoidal AC currents, and due to skewed magnets and sinusoidally distributed windings in their stators, they also produce sinusoidal back EMF. Sinusoidal commutation is a common way to control BLAC motors, as it provides a very consistent torque output with little torque ripple. But at high speeds, sinusoidal […]
FAQ: What are servo pancake motors and how do they work?

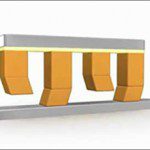
Traditional brushed DC motors are cylindrical in shape and have a stator with permanent magnets surrounding an armature made of windings. Cylindrical motors have a radial air gap and magnetic flux, with current running axially along the length of the motor. A special variation of the DC motor, known as a printed armature motor or […]
FAQ: What’s the difference between contouring and point-to-point motion?
The purpose of motion control is to move an axis, or multiple axes, to a specified position or through a predefined path. For the first case, some form of point-to-point positioning is used. For motion that must pass through a predetermined set of points, a method known as contouring is used. The choice between point-to-point or contoured […]
FAQ: What is trapezoidal back EMF?
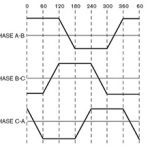
The primary distinction between brushless DC (BLDC) motors and brushless AC (BLAC) motors is their back EMF waveform. BLDC motors typically have a trapezoidal back EMF, while BLAC motors (also referred to as permanent magnet synchronous motors, or PMSM) have a sinusoidal back EMF. The shape of a motor’s back EMF is important, because it […]
FAQ: What is sinusoidal back EMF with sinusoidal current?
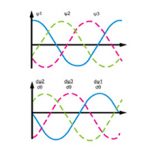
Both brushless DC (BLDC) and brushless AC (BLAC) motors are permanent magnet, synchronous devices. They both produce torque and speed through the interaction of a rotating magnetic field in the stator and permanent magnets on the rotor. But while they have many similarities, differences in their stator construction produce different back EMF waveforms and result […]
FAQ: What are the different ways that industry classifies servo motors?

A servo system is one in which the system’s error (in position, speed, or torque) is corrected through the use of a feedback device that compares the system’s actual performance with its commanded performance. What makes a motor a servo motor, then, has less to do with its construction and operation, and more to do […]
FAQ: How do linear stepper and linear ultrasonic piezo motors differ?

There are a number of ways in which piezo ceramics can be used to create linear motion, providing any combination of high speed, long travel, and high force. Two common types are linear stepper and linear ultrasonic piezo motors. Both use the inverse piezoelectric effect to activate a rod or pusher and create linear motion, […]
FAQ: Where are linear stepper piezo motors suitable?
There are several types of piezo motor that provide linear motion, with one of the most widely used being the linear stepper piezo motor. These devices harness the coordinated motion of multiple piezo elements to produce virtually unlimited travel with high resolution and very high stiffness. Construction and operation In the linear stepper design, multiple […]
FAQ: What are servo feedback gains, overshoot limits, and position error limits?
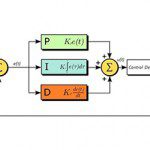
Servo tuning can be accomplished by several methods, but the most common way is to use a PID algorithm. The PID algorithm uses three feedback gains—proportional gain, integral gain, and derivative gain—to compare the commanded position (or velocity) with the actual value and issue commands to correct errors between the two. Feedback gains determine how […]