

The idea of brushed servo motors may seem a bit counterintuitive—most of us think of servo motors as high-performance devices used in highly dynamic applications, while brushed DC motors are low-cost solutions for mass-produced consumer devices. And, to a large extent, this is correct. But remember that “servo motor” is a fairly broad term that […]
FAQs + basics
What do USB data-logging ports do on programmable automation controllers (PACs)?

By Steve Meyer || Data logging (and use of that data later) was once a complicated venture possible only through specialty hardware and applications — often in the form of standalone supervisory control and data acquisition or SCADA systems. Even new software and PC-based systems come at significant cost. In contrast, many of today’s programmable […]
What are DCS, RTU, PLC, and PC functions on programmable automation controllers?
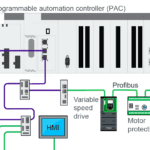
By Steve Meyer || Distributed control systems (DCSs), remote terminal units (RTUs), and programmable logic controllers (PLCs) are control systems with hardware and programming designed to meet the requirements of specific applications. Today’s programmable automation controller (PAC) hardware runs DCS, RTU, PLC, and PC functions as software to replicate the legacy hardware that’s operated in […]
What stepper motor type is best for high torque?
Stepper motors are commonly recognized for their holding torque, which allows them to hold a load at standstill. But for dynamic movements, it’s the motor’s pull-out torque that is important. Pull-out torque is the amount of torque that a stepper motor can produce while it is rotating, without causing it to lose steps. A stepper motor’s ability to generate […]
What are sequential function charts (SFCs) for PLCs?
Sequential function charts (or SFCs) are one of the five PLC programming languages defined by the IEC 61131-3 standard. (The others being ladder logic diagrams, function block diagrams, structured text and instruction lists.) SFCs are a graphical programming language, not text-based. Being a visual programming language means that it’s well suited to the task of […]
FAQ: How does the performance of parallel and right-angle gearmotors compare?
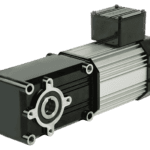
A common way to classify gearmotors is by the output shaft orientation, and two of the standard types are parallel and right-angle arrangements. Beyond shaft configuration itself, other factors such as the type of gears used in the gearmotor determine performance. Generally speaking, a right-angle gearmotor is less efficient than a parallel configuration. A typical right-angle […]
Why is the electrical time constant important for stepper motors?

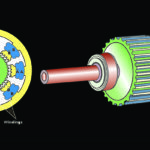
Motor windings have a property referred to as inductance, which is a resistance to any change in the electrical current through the winding. The result of inductance is the production of back EMF to oppose the change in current. Where: Eb = back EMF (volts) L = inductance (H, or Ohm-s) dI/dt = rate of […]
FAQ: What to know about integrating I/O with a PLC?

Input/output (or I/O) is central to every PLC. I/O is the connection of the controller to the outside world and to the machine or process being controlled. Inputs to the PLC can be either voltages or currents representing physical variables or the status of devices such as switches, motors, or lights. Inputs and outputs can be […]
Why is the bandwidth of a servo control loop important?
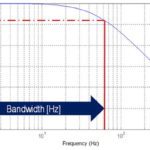
A servo drive can include any combination of three types of control loops—a position loop, a velocity loop, and a current loop. While each loop’s purpose is to control a different aspect of the motor’s performance, they are all characterized by a common parameter: bandwidth. The bandwidth, or response time, of the system is a measure […]
FAQ: What are characteristics of planetary gearmotors?
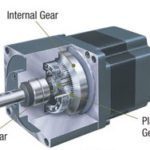
Gearmotors can incorporate different gear types. Common types include spur gears, worm gears, helical gears, planetary gears, even harmonic gears. One of the more common types, especially used with dc motors, is the planetary gearmotor. The two biggest advantages of planetary gearmotors are high power density and compactness in both size and weight. Planetary gearmotor efficiency […]