

When driving stepper motors open loop, there is no feedback to ensure that the motor is operating as expected. To ensure the stepper motor behaves as expected, open-loop drives use pulse and direction commands. Pulse commands are signals sent to a stepper motor by the drive. They are “pulses” of current that cause the motor […]
FAQs + basics
FAQ: What is closed-loop stepper motor control with step-loss compensation?
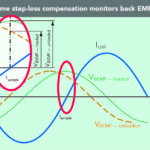
Closed-loop stepper-motor control with step-loss compensation is a common performance-boosting algorithm for stepper systems. In one prevalent form of step-loss compensation, an angle sensor or encoder tracks the motor-rotor position and any missed steps. Then the controller records its commands and the actual motor position from the encoder … converting position data to the equivalent […]
FAQ: What are programmable multi-axis controllers?
Multi-axis controllers are controls for which the entire hardware and software structure is organized around managing complex motion. Given the compute capability of today’s PC processors, any recent generation PAC or PC based controller can handle multi-axis motion control. However, each platform can address the problem in different ways. It’s common to have many independent […]
FAQ: How to tune servo systems for high dynamic response?
The purpose of a servo control loop is to minimize error, and this is often done through the use of PID (proportional-integral-derivative) gains, which correct errors between the target value and the actual value. But the PID algorithm is reactive, and takes time to respond. Case in point: the proportional term requires an error in order […]
FAQ: How to use incremental encoders with stepper motors?

When using a stepper motor, integrating an incremental encoder is relatively straightforward. Still, there are some general guidelines to consider. Incremental encoders (like any encoder) all function as part of a feedback system — providing closed-loop operation. Using information from the encoder, the drive system alters motor operation. However, incremental encoders don’t keep track of […]
How to program smart encoders and their diagnostics

Edited by Zak Khan || Smart encoders are encoders that contain hardware and associated software that let them dynamically change settings such as resolution and output circuit type. So one model of smart encoder can often replace many different models of traditional encoders. Read the related encoder FAQ: Why do some encoders have embedded microprocessors for signal […]
FAQ: Why do some encoders have embedded microprocessors for signal processing?

Edited by Zak Khan || Embedded microprocessors in encoders offer many advantages. They improve reliability, accuracy and responsiveness. Plus in the case of magnetic encoders, embedded microprocessors can give encoders characteristics associated with optical encoders, but without optical-encoder drawbacks of sensitivity to dust. Signal processing software running on a microprocessor can make rotation measurements that […]
Crossover frequency: How is it used in servo motor tuning?
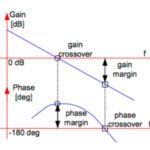
A common method for evaluating a servo system’s stability is to determine the system’s frequency response, which involves measuring the gain margin and phase margin at the crossover frequencies. To understand how gain and phase crossover frequency is used to determine stability, let’s look at exactly what it represents, using a Bode plot. Closed loop systems are difficult […]
FAQ: What are efficiency requirements for continuous vs. intermittent duty gearmotors?
In accordance with recent changes in motor efficiency laws, it’s now mandatory that continuous duty motors for integral gearmotors be Premium Efficient. It’s important to recognize that this requirement only applies to continuous duty motors. Motors rated for intermittent operation (for non-continuous applications) are not required to be Premium Efficient. Premium Efficient motors have more […]
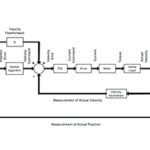
FAQ: What are servo motor current, velocity and position loops and bandwidths?
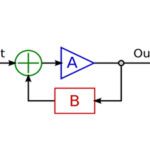
Servo motors operate in a closed-loop system, which includes a feedback device, a drive (amplifier), and a controller. The controller uses output from the feedback device to compare the commanded value (position, velocity, or torque) to the achieved value and issues commands to the drive to correct any errors. This process of monitoring feedback and […]