
A servo motor is, by definition, one that runs closed-loop, with feedback to control the motor’s position, speed, or torque. Of motors that run open-loop, with no feedback device, stepper motors are the most common type. Despite their different control mechanisms, stepper and servo motors have a few characteristics in common. First, they both have a rotor with permanent magnets and a stator with coil windings. Second, both motor types are synchronous, which means that the rotor turns at the same speed as the magnetic field of the stator. Despite these similarities, however, there are two physical differences between servo and stepper motors that give them vastly different operating properties.
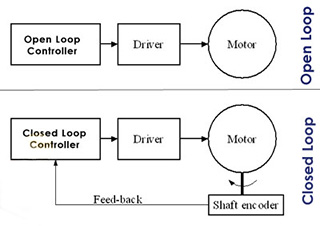
Control schemes of servo motors and stepper motors
The main distinction between servo and stepper motors is that servos are closed-loop devices and steppers run open-loop. This means that servo motors have some sort of physical feedback mechanism—typically a rotary encoder or resolver—to “close the loop,” comparing the motor’s intended position with its actual position and ensuring that the intended position is reached. Stepper motors, on the other hand, do not include a device for providing feedback. (Note that a stepper motor can run in closed-loop mode, with the addition of external feedback, such as a linear encoder.)
Running in open-loop mode means that stepper motors draw full current at all times—even when idle—and generate heat that must be accounted for and mitigated in some applications. But drawing continuous current allows them to produce a higher holding torque than servo motors. Conversely, because servo motors operate in response to feedback, they draw only the current needed to execute the given move. The lower heat generated during continuous operation also allows servos to provide a short-term torque level—known as peak torque—that’s much higher than their continuous rating, which facilitates quick accelerations or short-duration pressing or holding forces.
Pole count
Another physical difference between servo and stepper motors is their number of magnetic poles used in each motor type. Servo motors have just a few poles—typically between 2 and 8—while stepper motors commonly have 50 or 100 poles. The higher pole count found in stepper motors allows them to accurately move to a given position without the need for feedback (see above). Servos, on the other hand, are unable to control their position accurately without using a feedback device.
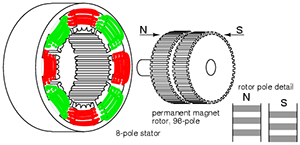
Image credit: allaboutcircuits.com
With fewer poles and less inductance in their windings, servo motors can maintain their torque output as motor speed increases better than stepper motors can. This also gives servo motors higher dynamics and the ability to execute quick movements. On the other hand, the high number of poles found in stepper motors allows them to run very smoothly at low speeds, making them best for low-speed, high-torque applications.
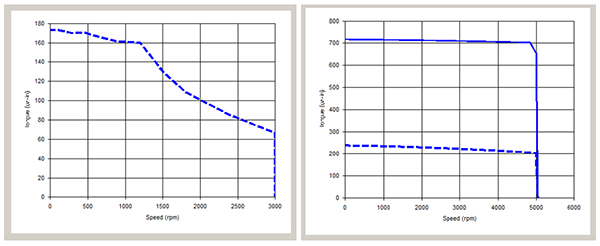
Image credit: Cross Company Automation
Leave a Reply
You must be logged in to post a comment.