
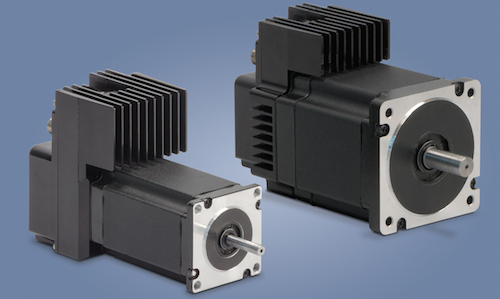
Updated November 2019 ⚙️ Assembling a traditional servo system necessitates the wiring together of a separate motor, encoder, amplifier, and controller. In contrast, integrated motors are sometimes classified as plug-and-play motion components — as they can usually be setup out of the box with less engineering effort. The basic idea is easy to understand:
Integrated motor-drive systems combine a motor and a drive at the very least … and some integrated-motor variations also include other components such as controllers and encoders.
Note that sometimes these integrated motion subsystems are simply called drives. Read about how these differ from servo drives here.
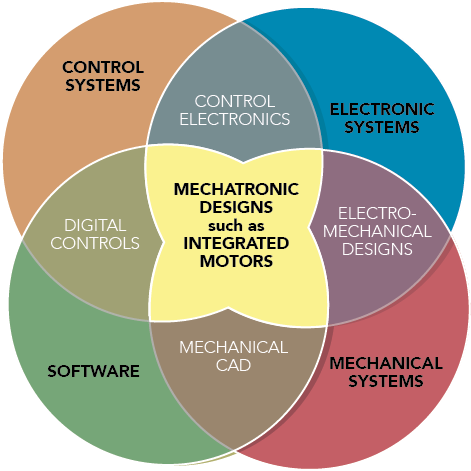
Integrated motors — the original mechatronic design
The blurring between mechanical and electrical engineering disciplines has continued unabated. This has spurred mechatronic designs that incorporate mechanical, electrical, and electronic elements in tightly integrated builds. Nowhere is mechatronic design more common than in the field of motion control …
… and here, the electric motor (and its core function of converting electromagnetic force into mechanical force) lends itself particularly well to mechatronic design in the form of integrated motors.
Recall that traditional motion designs have separate systems for managing current into the motor and logic signals. Usually commands based on feedback data (for prompting appropriate adjustments to drive current fed to the motor) comes from the calculations of a standalone PLC or other controller.
In contrast, the mechatronic nature of integrated motors means that usually such feedback-based current adjustments are made by electronics built right into the motor drive — which is in turn mounted directly onto the motor within the same monolithic housing. Besides other physical benefits, such controls can often deliver particularly tight control over motor torque and speed and mechanical components and attached loads on the axis.
Where integrated motors excel
Integrated motors find use on:
• Linear-motion axes for large-scale 3D printing machines
• Textile manufacture relying on hundreds of coordinated motor axes for proper material-web management
• Arc-welding applications where EMI can interfere with traditional encoder-feedback transmission methods
• Conveyors (intelligent and traditional) subject to washdown (and needing IP-rated motors mounted directly to the frame)
• Intelligent conveyors needing advancement of product concurrent with sorting
Besides eliminating the need for multiple components (and the work to get these components to all work together) another benefit is that the lower parts count of designs using integrated motors boosts reliability.

Fewer external connections mean less cabling and connectors (which trims connectivity costs). What’s more, advances in microcontrollers and power electronics have meant that drives run more coolly than in the past — so can be located quite closer to the motor windings. For integrated motors in which all motor signals are dc (and not quadrature or PWM) that actually minimizes electromagnetic interference (EMI) problems, especially when compared to traditional servo systems.
There can be drawbacks to motor+drive combinations … namely, limited configuration options (due to lack of customizability) and the potential for OEMs to find themselves wedded to one integrated motor vendor for future design iterations.
But integrated motor-drive components can reduce development times for engineers who make use of manufacturers’ (typically free) configuration GUIs and other programming tools. Loading this programming onto an integrated motor is usually via some serial communication link such as RS232 or RS485 or an Ethernet connection. In some cases, this kind of configuration and controls onboard integrated motors can let designers eliminate the need for external controllers such as PLCs.




Leave a Reply
You must be logged in to post a comment.