
By Kazuki Into, Circuit Development Manager • Oriental Motor USA Corp. || Because stepper motors run and then stop at each step angle, they deliver high-accuracy position control. But the way they incrementally advance causes vibration and noise. Now, some drivers use advanced electronics to track and control current into motors as a way to achieve smooth motion from two-phase microstepping setups.
Stepper motors should operate over all speed ranges without vibration. But real-world steppers vibrate when running at low, middle and high speeds with what’s called rotation vibration. That’s because rotor speed varies between each move to a main step angle.
Suppressing rotation vibration at all these speeds is a challenge, but some setups use microstepping of the stepper motor as the first line of defense. Remember that microstepping is a control technology that divides the basic step angle of a motor by controlling current flow through the motor windings.
Reducing the step angle effectively minimizes speed variation when moving one step forward, which helps minimize vibration and motor buzzing.
Unfortunately, microstepping is often insufficient to mitigate all vibration. So, one newer approach to suppress vibration is current control. Here, in addition to microstepping, a microprocessor tracks and controls individual phase currents with advanced algorithms. More after the jump.
As we’ll explore, this design also leverages the fact that precisely controlling current running through motor windings can make the motor run more smoothly.
New stepper option put in context
Consider five-phase stepper-motor technology. One advantage of such setups is that circuits can use an all-phase current-detecting method that simultaneously monitors currents from all five cables into the motor. This traditional method of tracking motor input only needs one detecting circuit, so the circuit is simple. But this method can’t detect backflow current that never goes through the sensing circuit. Because of this, current control can become unstable, necessitating extra driver features to fully mitigate vibration.
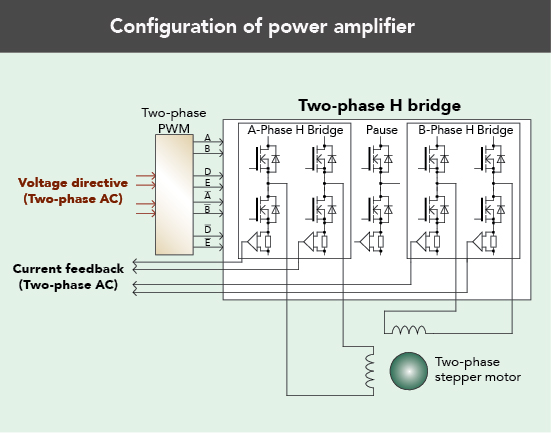
New vibration-suppression drivers track individual current phases to control current. They detect the five different currents separately — or in versions of the driver for two-phase vibration-suppression, four different current controls. Here, the driver has a microprocessor running advanced algorithms programmed to maximize torque with current correction.
Maximize output with motor’s electromagnetic profile
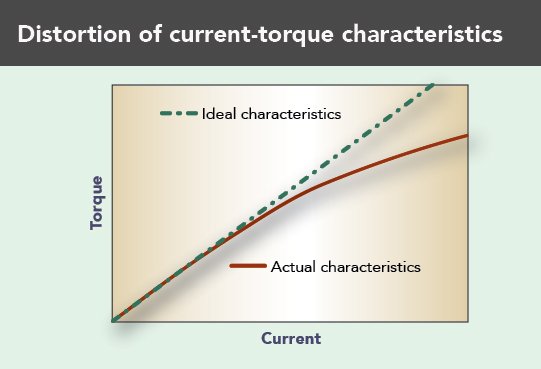
Remember that motor output torque is proportional to input current when the latter is below rated current. But consider what happens when current goes higher.
Here, the driver applies to the windings a current that comes to exceed rated current, due to the magnetic saturation phenomenon caused by armature reaction of the magnetic flux. It is then that the relationship of the current and torque gradually strays from its proportionality.
So to increase a motor’s output torque, motion designs must effectively use this range of non-proportional motor response.
New vibration-suppression drivers apply the individual-phase current detecting method with microprocessor technology running advanced algorithms. These setups pair advanced microstepping with functions to get smooth micro-stepping at all speeds. In addition, some vibration-suppression drivers offer advanced microstepping functions.
Case in point: One proprietary option for smooth driving enables good low-vibration operation from a microstepping driver with the flick of a dip switch on the driver circuit board. The smooth-drive function automatically controls the motor’s microstep drive operation at the same travel and speed as in full-step mode, without making the operator change speed settings of the driver’s pulse input. So the function eliminates the need to increase pulses to the driver.
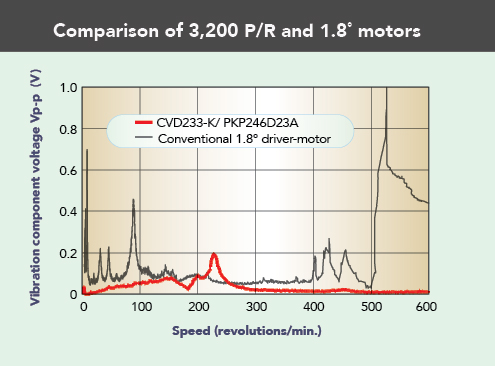
Consider how most microstepping drivers offer resolution to 0.007° or 51,200 microsteps per revolution. In contrast, vibration-suppression stepper drivers that take the form of two-phase bipolar drivers automatically microstep 0.0008° or up to 2,048 steps per full 1.8° step of the motor. With the smooth-driving feature enabled, the drivers significantly improve overall performance across all speed ranges, not just at slower speeds — drastically reducing vibration that can cause step errors. This gives design engineers a wider design window of motor speed with a set level of performance.
Correcting sinusoidal current into stepper motor
Another way to smooth motor output is to minimize torque ripple, which is the fluctuation of output torque when changing excitation phases. Here, some algorithms correct sinusoidal current into the motor.
If the relationship of the motor current and generated torque were a linear form, torque ripple wouldn’t arise from current changes at each phase to a sinusoidal wave.
However, the relationship of the motor current and generated torque is not linear. Therefore, torque distortion arises when changing current at each phase of the sinusoidal wave. This happens when current is high — and that in turn causes vibration. So dealing with high output torque and low vibration at the same time requires an additional control.
To solve this issue, some vibration-suppression stepper drivers appropriately correct the phase of the sinusoidal current supplied to the motor, known as phase control — or properly switch the electrical phases at critical times. These switching times are based on the most common characteristics found in stepper motors. As these characteristics are unique from motor to motor, such drivers use proprietary phase control technology for specific motor sizes and input currents to get ideal performance.
The program does this by matching rated motor current to driver current. In other words, it matches the maximum current value of the motor to maximum of the driver — for example, a 2.8-A motor to a 2.8-A driver. This phase control corrects the distortion of current-torque characteristics, so it concurrently mitigates low vibration and maintains high output torque. This in turn improves stop-position accuracy.
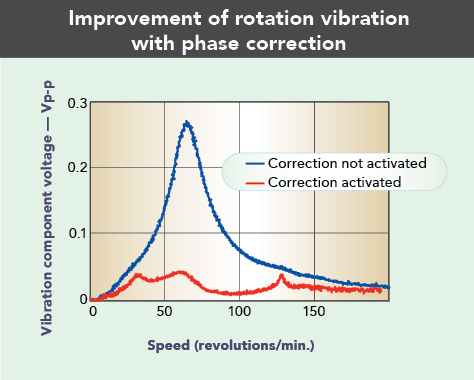
Activating phase correction dramatically reduces peak vibration values. The optimized level of phase correction depends on the motor’s magnetic properties, so the correction value is best set to cater to specific motor-driver combinations. That’s why vibration mitigation with this method depends so heavily on well-paired motors and drivers.
Oriental Motor USA Corp.
www.orientalmotor.com



Leave a Reply
You must be logged in to post a comment.