
maxon precision motors now makes right-angle gearheads for maxon’s 22-mm and 32-mm dc motors. These high-torque gearheads transmit power at 90° in the smallest possible form factor (thanks to spiroid technology). Other features:
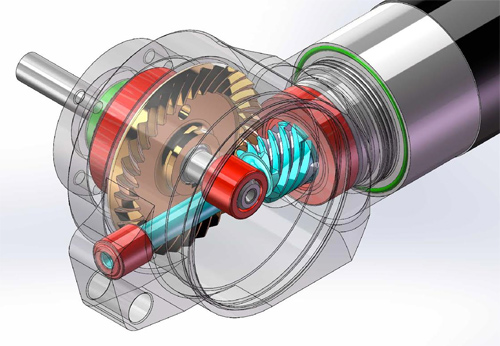
• Quiet operation and high torque transmission
• High stiffness and low deflection with large applied loads
• Back-drivable (4:1 ratio) and non-back drivable (31:1 ratio) versions; low backlash and a contact ratio of up to 3:1 gear teeth
• High torque-to-space ratio
The gearheads come in either a 4:1 or 31:1 ratio for mounting to brushed or brushless motors, or configured with different ratios of maxon’s GP22 and GP32 planetary gearheads — for myriad reductions. The motor-and-gearhead combinations are suitable where the output shaft must be perpendicular to the motor axis. For more information, visit maxon precision motors inc.
Application example: Humanoid walking robot
 In one specialty application, A&M researchers recently put maxon right-angle gearheads into a bipedal robot. The Bipedal Experimental Robotics Lab (AMBER) built the human-like bipedal walking robot (called the AMBER 2) in an effort to advance robotics of this design to practical uses in disaster response, military operations, elderly assistance, rehabilitation, and prosthetics.
In one specialty application, A&M researchers recently put maxon right-angle gearheads into a bipedal robot. The Bipedal Experimental Robotics Lab (AMBER) built the human-like bipedal walking robot (called the AMBER 2) in an effort to advance robotics of this design to practical uses in disaster response, military operations, elderly assistance, rehabilitation, and prosthetics.
The AMBER 2 robot uses three motors and three right-angle gearheads per leg, one for each joint—ankle, knee, and hip. At first the team used the maxon motors along with another vendor’s right angle gearhead, but high torque and misalignment-related vibration quickly broke the joints.
“We … needed a seamless package to maintain tight tolerances for the joint mechanisms,” said lead researcher Dr. Aaron Ames. When the robotic foot hits the ground, the motors have to reverse on impact, which causes a huge amount of torque on the motor—so here, the AMBER 2 uses maxon’s brushless motors.
Read more about the humanoid-robot design here.
In other news …
Leave a Reply
You must be logged in to post a comment.