
 Few motion technologies show more recent innovation than positioning stages. Their hardware and software are increasingly custom to fit specific output requirements, thanks in large part to tighter integration and advanced programming. No wonder that today’s positioning stages can make moves with incredible accuracy; synchronize complicated axis commands; and optimize travel from coarse and fine drives in tandem, closing the loop on one common position feedback.
Few motion technologies show more recent innovation than positioning stages. Their hardware and software are increasingly custom to fit specific output requirements, thanks in large part to tighter integration and advanced programming. No wonder that today’s positioning stages can make moves with incredible accuracy; synchronize complicated axis commands; and optimize travel from coarse and fine drives in tandem, closing the loop on one common position feedback.
Key to these developments are steadily improving mechanical components. “Deeper understanding of mechanical designs that best actuate newer measurement and simulation techniques gets us better dynamic performance. For example, with [true mechanical] 1-nm minimum incremental motion, it’s now possible to make extremely small and reliable steps with existing designs,” said Beda Espinoza, manager of motion products at Newport Corp.
Feedback and control innovations are also improving metrology, particularly in high-end stages. “Today’s most advanced encoders use novel optics that get nanometer-scale resolution and repeatability out of stages with many millimeters or inches of travel. Meanwhile, control algorithms have advanced to the point that even large, heavily loaded stages can perform sub-sub-micron motions crisply and dependably,” said Scott Jordan, director of nano-automation technologies at Physik Instrumente (PI) LP.
Here’s how a controller works to close the loop on one position feedback, even with concurrent course and fine actuation.

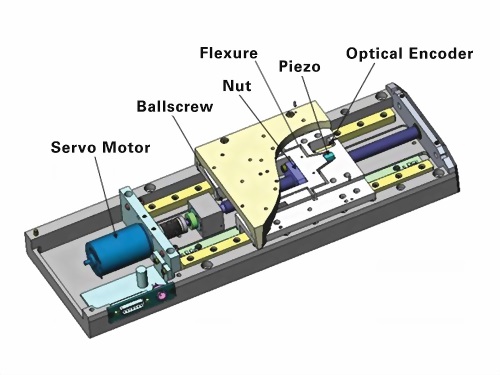
In the same way, advancing metrology techniques and controls are getting increasingly stringent performance from piezo-flexure stages that output high-bandwidth actuation over multiple degrees of freedom.
“These stages drive applications that were beyond the realm of imagination just a few years ago: advanced microscopies that burst the Rayleigh limit; semiconductor lithography that tracks Moore’s Law down to the atomic scale; silicon photonics manufacturing that integrates exquisite nano-optical structures alongside next-generation microelectronics; and genomics analyzers that are rapidly approaching clinic-level affordability. These are all profound developments, and they’re just a sample,” said Physik Instrumente’s Stefan Vorndran.
There’s also advances in voice-coil linear motors that output millimeter-amplitude motion over high duty cycles with exacting force control. More after the jump.

In the research realm, PI has contributed new classes of long-travel piezomotor stages that travel over millimeters with nanoscale positional stability over long intervals of many minutes. Combined with multi-axis nanopositioning stages, these are assisting the new post-Rayleigh microscopy techniques to peer ever-deeper into the previously hidden mechanics of life itself.
Jordan added that more end users are looking to buy pre-engineered stages and Cartesian robots, and that trend reflects a need for speed in industrial and research applications alike. Today’s innovation is fast, as new discoveries and techniques continuously snowball to rapidly empower new applications. It’s no wonder that today’s motion-equipment users want contributors instead of component vendors—with technical prowess founded on solid data rather than fanciful hype, said Jordan.
Improvements on cookie-cutter Cartesian setups

On larger-scale stages, an advanced philosophy is the upfront design for multi-axis stackability versus stackability as an afterthought. That’s according to Mike Everman, principal and chief technology officer at Bell Everman. Stacked stages should be designed from the get-go with stacking in mind, rather than bolting together stand-alone components using kludgy brackets, he said. For instance, the chassis of an upper stage in a stack can replace the top plate of the lower stage, rather than adapting to it. This reduces part count, height and tolerance stackups. “A mentality that says, ‘Add this and this and this from page 356 of our catalog’ is not well-suited to optimized motion solutions,” said Everman.
“We see higher demand for integrated precision-motion systems,” agreed Jordan. The traditional mode of getting multi-axis motion has been to stack individual linear stages into X-Y-Z combinations. Then if a machine needs more degrees of freedom, the builder adds goniometers and rotation stages for theta X (roll), theta Y (pitch) and theta Z (yaw). “While modular and simple, this serial kinematic approach isn’t always best. It can be bulky and can accumulate linear and angular positioning errors that amount to a big surprise at the output … the point where it matters most to the application,” said Jordan. In addition, serial kinematics are limited by their mechanical bearings to one center of rotation.
Jordan touted Stewart platforms as a superior approach to multiaxis motion, at least for smaller and extremely precise moves. “The motion of hexapod platform robots isn’t defined by linear and rotary bearings, but by mathematical algorithms in the controller,” he said. Advantages are a user-defined center of rotation, also called the pivot point; no accumulation of motion errors of individual axes; no cable-management issues; lower inertia and higher stiffness, as six parallel actuators support a single platform; and an open aperture. Hexapod designs abound. Case in point: If long travel ranges in the X-Y plane are more important than the other four degrees of freedom, PI recommends a low-profile planar design.
“We leverage expertise in design, materials and manufacturing to provide stages that would be costly for an end user to produce on their own. The future will see different drive technologies merge and continuous miniaturization in multi-axis systems like hexapods,” agreed Newport’s Espinoza.
This PI SpaceFAB design has a larger X-Y positioning range and a lower profile than comparable Stewart platforms.
“With traditional motion systems, parallel positioners, and electromagnetic and piezoelectric motors, we can work on myriad applications and draw from lessons across disciplines and industries,” said Physik Instrumente’s Jordan. “For example, a genomics end user can benefit from lessons learned in semiconductor fabrication, and a photonics end user can leverage tools and technologies originating from advanced astronomy applications, and so on.” In today’s increasingly connected world, innovation happens at the intersections, he added.
This is a high-speed linear motor hexapod in action.

Note that most machines need “utilities” routed to the payload or the next axis up—air for pneumatic end effectors, signals for feedback or vacuum lines—so adding the motor’s cabling to the cable management is unobtrusive. “That’s why one technical advance we’ve embraced is the moving-motor design, in which the moving carriage contains the drive motor,” said Everman.
More specifically, Everman cites ServoBelt, ServoNut and other linear-motor variants with long travel per overall stage length. Maximizing travel per overall length is relevant because many engineers design machines from the outside inward—an approach that invariably leads to requests for challenging travel length specifications within a given overall length because the envelope has been already set. “Here, catalog stages are rarely capable of good ratios. In contrast, moving-motor setups and machines with multiple carriages on the same axis (or multiple bridges on the base axes of a gantry) give better results,” Everman said.
He conceded that conventional screw stages—with motor and coupler on the stage end—still have their place. “They are generally simpler to implement when utilities needn’t be delivered to the payload or overall length isn’t an issue. In these cases, we typically depart from driven-screw stages by embedding the motor coupler inside the stage as on most planetary gearheads,” he said. This lets the coupler occupy the same space as the carriage at the motor end of travel. There’s no coupler housing, so motor length is the only item that adds to the overall stage length. “Likewise, we put power-off brakes inside stages on the screw’s free end, not on the motor. This reduces length and eliminates the specification troubles associated with brake motors,” said Everman. Plus it lets the manufacturer take design responsibility for how the stages stop and go, independent of the end user’s choice of third-party motors.

Stages are sum of the parts
Integration is key to getting the most out of stages, and that means machine builders must tailor controls to applications.
“In terms of technological advances for higher-performing applications, we’re seeing that integrated mechatronics are necessary … and advances in all mechatronics areas are really key motion-innovation drivers. After all, a system is only as good as its weakest link. So, if a designer has a great stage solution and poor controls and drives, the end result is an underperforming system,” said Brian O’Connor, product manager at Aerotech.
What makes today’s designs interesting is that all the technologies used in stages continue to evolve. So now there are always smaller, more-accurate feedback devices, more efficient motors and drives, and higher-performing bearings that combine into better-performing integrated stages. “For example, our nanopositioners have direct-drive motors built into the stage. This makes a smaller package with better thermal management and nanometer positioning,” said O’Connor.
Electronics with lower noise feedback and better power amplifiers are drivers of high-performance motion, though perhaps a more critical development is the ever-advancing suite of control algorithms boosting positioning accuracy and throughput. “An example of a complete mechatronics approach is our piezo nanopositioning stages and drive electronics,” said O’Connor. The feedback system, bearing system, power electronics, and controls techniques were designed from the ground up. “This approach, although more costly to develop, really enables atomic-level positioning resolution, repeatability and accuracy,” he added.
Controls also give engineers more options than ever for networking positioning-stage axes. Consider how engineers at Moog Animatics have designed Combitronic communications to operate over a Controller Area Network (CAN) interface, which is the same basic hardware used in most automobile and industrial networks such as CANopen and DeviceNet. Unlike these protocols, however, a Combitronic network needs no dedicated master or slave devices to operate.
Instead, all networked servo devices communicate as equally ranked devices to share information and processing resources.
The communication’s stand-alone linear-interpolation algorithms let any of the network’s SmartMotors command interpolated paths across multiple motors at once. This provides synchronized motion without a centralized processor, so end users can command path velocity, acceleration, deceleration and target points in three Cartesian dimensions.
For large parallel-axis gantry machines, synchronized commands let users combine up to three pairs of motors for full control of X, Y and Z axes. At any time, additional axes of motion may be added as supplemental axes that are proportional to the master axis. This allows over 100 synchronized motion profiles at once.
This video features 14 Moog Animatics L70 actuators controlled by 14 SmartMotors. The latter are servo-motion controller-motor-drive-encoder-amplifier combinations that use Combitronic technology over CANbus to output synchronized motion control. Up to 99 SmartMotors can link together.
Markets driving positioning-stage innovation

Myriad industries are spurring changes in the design of integrated stages. “In medical applications, research in neuroscience and biology now needs positioning systems with performance levels that were unachievable 10 years ago,” said O’Connor of Aerotech. Another area getting a lot of attention is additive manufacturing. There’s a lot of research in academia and institutions to understand the process variables and limits of manufacturing precision, O’Connor added. Motion systems are at the heart of machines and the metrology systems that characterize parts coming off of these machines. “The need for higher-performing systems is requiring more of a mechatronics approach in all aspects,” he said.
The packaging industry is another leading force. “It seems to be a primary driving industry for fast, embedded subsystems,” said Everman. “Integrators specializing in packaging lines don’t have time or inclination to take multi-axis functions from scratch, axis by axis. Nor is it practical to keep that kind of design talent around all year for a sporadic need … so packaging integrators would prefer to have all operations on the line boil down to two questions: ‘Can I talk to this robot?’ and ‘Can my product flow in-line from one end to the other?’”
Special-purpose CNCs are making their way into more applications as well—for example, in crown milling machines in dentists’ offices or 3D printers in classrooms. In general, the best manufacturing lines have a dedicated purpose, such as G-code programmable devices that drill a specific pattern of holes in one part all day and night, explained Everman. Repurposing a general-purpose CNC mill to a narrow task can be two or three times the cost of building a special-purpose CNC. That cost equation is driven in part by the availability of economical CNC controls that weren’t available ten years ago.
“We’ve recently made embedded motion subsystems to improve the overall machine design in semiconductor wet-bench systems, portable medical-imaging equipment, laser cutting machines and a dental crown milling system,” said Everman. “We’ve also seen an uptick in large-format applications that leverage our ability to splice together servo-belt stages without length limitations, compromises in repeatability or commissioning difficulties. It is extremely expensive to do long-format jobs with linear motors and difficult to do them precisely with rack-and-pinions … and nearly impossible to do well with screws or conventional belts. I say ‘well’ because we’ve seen claims of long travel, intermittently-supported screws that never seem to work in demanding applications.”
According to Vordran, it’s hard to think of industries that aren’t spurring changes in the design of integrated stages. It’s an era of tremendous change and rapid progress. “For example, in the life sciences, we see the rapid approach of personal medicine—where therapies are custom-designed to a patient’s DNA. In data storage, areal densities continue to escalate.”

In semiconductor manufacturing, device scales continue to diminish exponentially, and now the new era of silicon photonics is dawning, promising a step-function in energy efficiency and throughput in data centers, said Jordan. “The new advanced microscopies, such as those that earned this year’s Nobel Prize, are revealing new insights into the structure of life. It’s a brilliant time for ultra-precision motion control, which is central to all of these,” he added.
Case in point: PI works with semiconductor manufacturing and photonics companies to solve rapidly emerging production-test and packaging-automation needs … as photonic devices make their way onto silicon wafers alongside integrated circuitry. “This is truly a new era for semiconductor manufacturers, and the stakes are very high. Test requirements are exceedingly demanding, and test time is very costly. To address these issues, we invented alignment-automation technology so that fast testing and packaging automation can be economically integrated into the semiconductor fab workflow,” Jordan said. “These applications leverage everything we’ve learned about making reliable, production-worthy automation subassemblies.”
Final words on stage distributors
When asked about the evolving ways in which end users specify stages, Everman said that distributors have value with their walk-in privileges, and customers sometimes mandate the use of a distributor to reduce their number of suppliers and maximize discounts for volume. “Yet given the highly-engineered nature of embedded motion systems, our distributors have had to become partners that seamlessly migrate from carrying the ball on the simple things to passing it off for trickier engineering jobs.” As for manufacturing, Everman said that all have had to get leaner, carry less inventory, and be more responsive to requests for changes in scope, features and push-pull on blanket orders. “Be nimble or die,” he concluded.
Leave a Reply
You must be logged in to post a comment.