
One of the first decisions when choosing a rotary encoder is whether it should provide incremental or absolute position feedback. That choice primarily depends on whether the encoder should be able to exactly detect its position upon startup. If so, then an absolute encoder is typically required.
When considering an absolute encoder, the next decision is whether the position tracking requirements are suitable for a single-turn encoder, which can supply position information within one encoder revolution.
When the travel distance exceeds one encoder turn, a multi-turn encoder is required. Multi-turn encoders can track position information over multiple encoder revolutions and are often used for linear axes or for rotary axes that have “endless” rotation, such as conveyors or rotary tables that travel only in one direction.
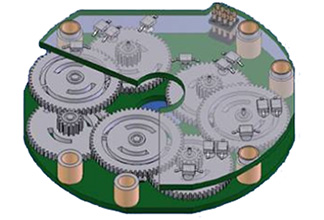
Image credit: A-Tech Instruments
Why is the number 4096 significant?
4096 is the number of revolutions that most multi-turn absolute encoders can track. As long as the number of revolutions is 4096 or less, the encoder can provide accurate position information, but if the encoder makes more than 4096 turns, the digital position values begin to repeat.
However, some drives and controllers offer a special type of position tracking, referred to as “modulo positioning,” that can store any overflow movement (rotations or partial rotations that occur after 4096 turns) and use this information to provide accurate positioning even beyond the maximum number of encoder turns.
A note about positions versus revolutions
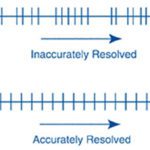
The number of steps, or positions, that an encoder can count in one revolution varies, but this number can also be 4096. An encoder that has 4096 positions, or steps, per revolution is referred to as a 12-bit encoder, because 212 = 4096. So for a 12-bit, multi-turn encoder, 4096 steps are counted for each revolution, and up to 4096 revolutions can be tracked.
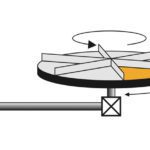
Absolute rotary encoders can use either magnetic or optical sensing technology, but regardless of the technology used, what makes the encoder absolute is the way the encoder determines position. Instead of tracking pulses of light or magnetism, as an incremental encoder does, for an absolute encoder, every shaft position corresponds to a unique digital value, or “word.” This is how the encoder knows, or reads, the shaft’s exact position, even if its position changed while it was powered off.
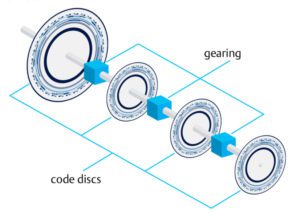
Image credit: Nidec
Multi-turn encoder technologies
Encoders that can track position over multiple revolutions typically use one of three technologies. The first is to use several encoder disks connected by gears. While the geared design is the most common, gears are mechanical elements that can wear and reduce accuracy, and geared versions tend to be larger than other multi-turn designs.
To avoid mechanical elements (i.e. gears), some multi-turn encoder designs use an electronic counter. The downfall here is that the counter requires a battery backup, which needs to be periodically checked and possibly replaced during the life of the encoder.
Another technology, known as the Wiegand effect, allows multi-turn tracking without mechanical elements or batteries. In this design, energy is produced by the moving encoder shaft via a specially conditioned wire known as Wiegand wire. This energy triggers a turn counter and writes the data to non-volatile memory. However, Wiegand encoders are generally not recommended for heavy-duty applications, due to the low levels of energy they generate.

Leave a Reply
You must be logged in to post a comment.