
For most types of motors, operating with a supply voltage that is higher than the rated voltage — referred to as overvoltage — can cause an increase in current, and heat, high enough to damage the coils and other motor components. But in some cases, a stepper motor can be operated at a voltage higher than rated voltage, without damaging the motor. Let’s look and when and why this is possible.

Stepper motor applications commonly use one of two types of stepper drive — a constant voltage drive (also referred to as an “L/R” drive) or a chopper drive.
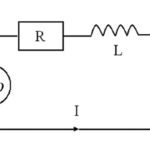
As their name implies, constant voltage drives deliver a fixed, constant amount of voltage to the motor, equal to the motor’s rated voltage. With a constant voltage drive, the motor’s resistance (R) limits the amount of current that can build in the windings, and the motor’s inductance (L), determines how quickly the current builds, or rises. (The term “L/R drive” is in reference to the motor’s time constant, which is defined by the inductance, L, divided by the resistance, R.)
At low speeds, motors operated with constant voltage drives provide good torque and smooth rotation. But as motor speed increases, the current in the motor windings doesn’t have sufficient time to rise during each drive pulse, so torque production falls off.
While higher current (and torque) could be obtained by suppling the motor with higher voltage (overvoltage), this causes a problem with the motor’s temperature rise, as the “off” time of the motor — the amount of time when no voltage is applied — must be long enough to allow cooling and prevent heat damage.
Because constant voltage drives deliver limited torque at higher speeds, many stepper motor applications use chopper drives. Chopper drives are also referred to as “constant current” drives because they monitor and regulate the current to the motor, rather than the voltage. The term “chopper drive” comes from the fact that the drive rapidly switches the voltage on-and-off (referred to as “chopping” the voltage) to control the amount of current delivered to the motor.
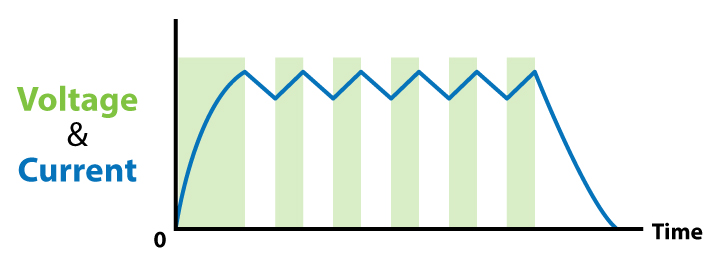
Image credit: Clippard
To ensure the stepper motor receives enough current to produce the rated torque, regardless of motor speed, a very high voltage, or overvoltage, is provided by the chopper drive. This high voltage ensures a fast current rise, so even if the motor is operating at high speeds, it receives a constant RMS (root mean square) value of current to produce the required torque.
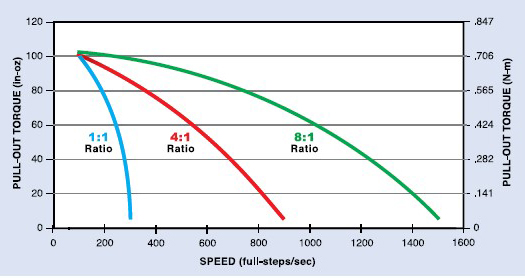
Image credit: Ametek
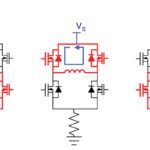
But why is it ok to drive a stepper motor with overvoltage when using a chopper drive? Because a chopper drive places a resistor in series with each motor winding to monitor the motor current.
When the voltage across the resistor reaches a predefined high level, which represent’s the motor’s rated current (I = V/R), the voltage supply is switched off. And when the voltage across the resistor drops below a preset level, the voltage supply is switched on again. Pulse-width modulation (PWM) is used to vary the width of the output pulses from the drive, according to how much voltage “on” time is needed.
The result is that torque can be controlled more precisely, and more torque can be produced at higher speeds, without the heating problems that would occur if overvoltage was applied with a simple L/R, or constant voltage, drive.


Leave a Reply
You must be logged in to post a comment.