
Servo motors are used in applications where precise control of position, speed, or torque is required. But many different types of motors can be considered servo motors — the defining feature of a servo motor is that it incorporates or reads feedback in a closed-loop system. In fact, although many servo applications use synchronous AC motors, DC motors can also be used in servo systems.
Synchronous AC motors are typically brushless (the exception being universal motors, which are mechanically commutated with brushes and can run on either AC or DC power supply). Likewise, the DC motors used in servo systems are most commonly brushless types (typically referred to as BLDC motors).
Note that brushed DC motors are capable of operating in a servo system, but the wear and maintenance they require — due to the mechanical brushes and commutator — make them less desirable for most servo applications. This article explains when it can be advantageous to use a brushed DC motor in a servo system, and specifically, what type of brushed DC motors are best for servo applications.
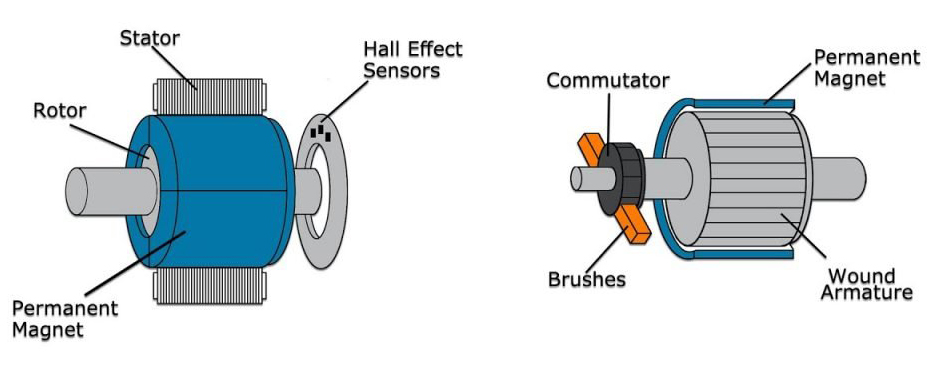
Image credit: Kinmore Motor
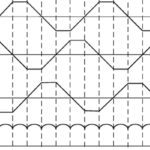
Recall that brushless DC motors use permanent magnets on the rotor and coils in the stator to produce rotation (and torque). This configuration is similar to a synchronous AC motor, but a key difference between BLDC motors and synchronous AC motors is in how the stator coils are wound. In a synchronous AC motor, the coils are wound sinusoidally and commutation is a continuous, sinusoidal waveform. This gives synchronous AC motors very smooth performance. BLDC motors, on the other hand, have trapezoidally wound stator coils and commutation that takes place in six steps (every 60 degrees), which can lead to torque ripple.
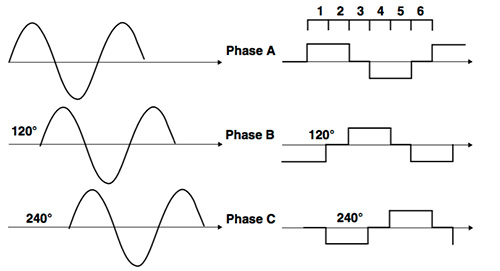
Image credit: STMicroelectronics
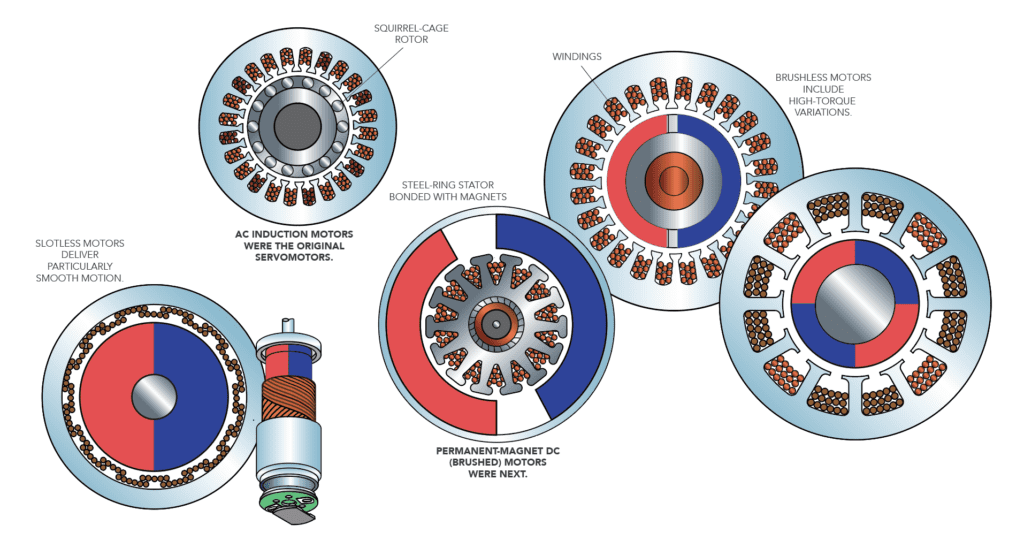
BLDC motor construction variations
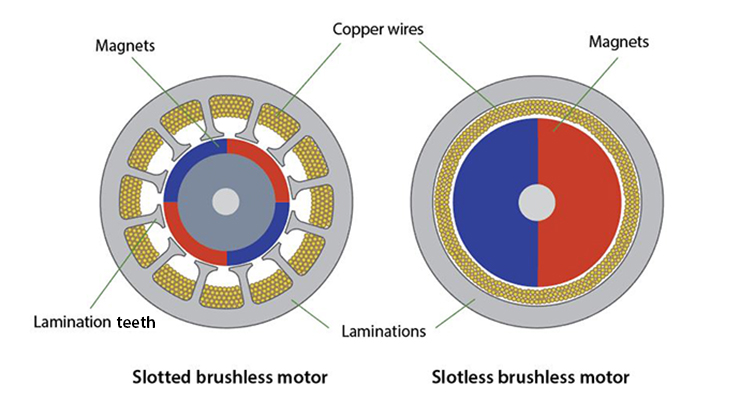
Brushless DC motors are typically constructed with a stator made from slotted steel laminations and copper windings inserted into the slots. Slotted designs can be constructed with the rotor at the center of the motor and the stator surrounding the rotor (sometimes referred to as an “inrunner,” or internal rotor, design). This reduces the motor’s inertia and allows for very dynamic performance.
Alternatively, slotted BLDC motors can be constructed with the slotted stator at the center of the motor and the rotor magnets surrounding the stator (sometimes referred to as an “outrunner,” or external rotor, design). This allows the motor to produce high torque and to be constructed with a short overall length (referred to as a “flat” design), but at the expense of reduced dynamics due to higher rotor inertia.
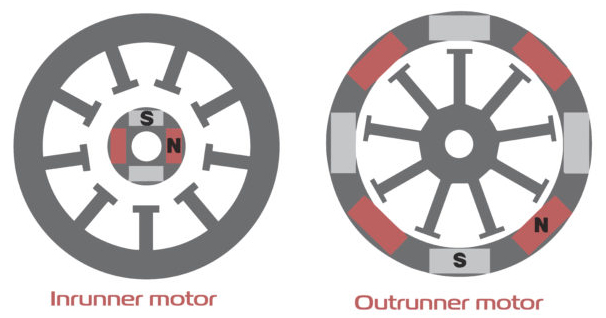
Image credit: Portescap
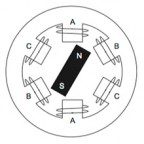
Whether constructed with an internal or external rotor, slotted BLDC motors suffer from cogging torque due to the permanent magnets in the rotor attempting to line up with the slots of the stator. The primary effect of cogging torque is that it causes motor rotation to be jerky, especially at low motor speeds.
A newer permutation of the BLDC motor is the slotless design. This design does away with the slotted steel laminations and instead uses a stator constructed of steel rings stacked together, with the windings encapsulated in an epoxy resin. The winding is placed in the air gap between the stator lamination and the rotor (which resides in the center of the motor). The slotless design eliminates cogging torque, reduces audible noise, and reduces inductance, so acceleration and dynamic response are improved over slotted designs.
BLDC motors are often used in servo applications that require high efficiency, high reliability, and good torque density (torque production for a given size), but without the magnitude of torque production that can be provided by larger, synchronous AC motors. Common applications for BLDC servo motors include robot joints, medical devices, and packaging equipment. Brushless DC motors are also ideal for battery-powered equipment and for applications that require direct integration of the motor into the mechanical design, thanks to their numerous design options and the myriad ways they can be customized.



Leave a Reply
You must be logged in to post a comment.