
By Edd Brooks • Senior Technical Support Representative | NEXEN Group
A critical requirement in the design of many machines is the need to protect against damage and downtime that is often caused by machine overloads. Torque limiters address this challenge by behaving as 1:1 transmissions as long as torque is less than a specified value. When the torque surpasses the limit, torque limiters operate as a clutch to disconnect the drive from the driven system in a short period of time.
By disconnecting the motor from the driven load, the torque limiter removes much of the inertial energy from the drive train, typically in a time period between a few milliseconds and tens of milliseconds. Typical applications for torque limiters include packaging machinery, conveyors, assembly lines, machine tools, woodworking machines, textile machinery, industrial robots, sheet metal processing equipment, printing and converting machines, and servo and dc motor drives.
Simple torque limiter devices
The simplest type of mechanical torque limiter is a shear pin that links two rotating bodies and is designed to break at a certain torque level to separate the drive system from the load. However, shear pins are rarely used when protecting mission-critical machinery because it can be difficult to accurately control the level of torque at which the shear pin will break. Thus, the potential exists for either nuisance failures if the shear pin breaks at too low of a torque or damage to the machine if the shear pin breaks at too high of a torque.
Friction torque limiters operate in a similar manner to automotive brakes with a drive component sandwiched between friction linings connected to a driven component that grips the drive component in normal operation. An overload causes the drive component to slip relative to the friction innings, protecting the machine from damage. Removal of the overload causes the drive to resume transmission of torque. The spring pressure of a friction torque limiter is adjusted to accurately change the level of torque that will cause the device to slip. Friction torque limiters offer simple and relatively low-cost overload protection so they are generally used in sprocket drives on conveyors and other similar applications. A disadvantage of friction torque limiters is that considerable amounts of wear occur when the torque limiter is operated at high speed in an overload state.
Ball detent designs for torque limiters
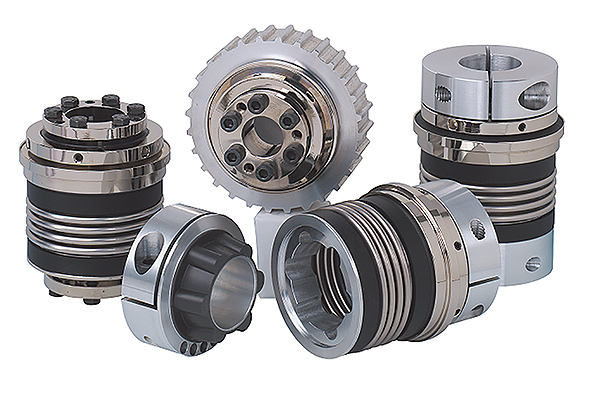
The ball detent style of torque limiter uses a series of balls or rollers to connect the drive element and the driven elements. The balls or rollers are positioned in mating sockets or detents in both the drive and driven elements and held in position under normal operating conditions by spring force. When a torque overload occurs, the balls or rollers overcome the spring pressure and force the drive and driven element apart. The balls or rollers then slide out of the sockets. This disconnects the driving and driven elements from each other so they rotate relative to each other in tracks around the plates.
Some torque limiters are designed so that when the overload is removed, spring pressure forces the balls back into the detents. This restores the drive connection, while others must be manually reset. Ball detent torque limiters more accurately control the torque value at which the load is disengaged and their response is more predictable than shear pins or friction torque limiters.
Pneumatic and hydraulic designs
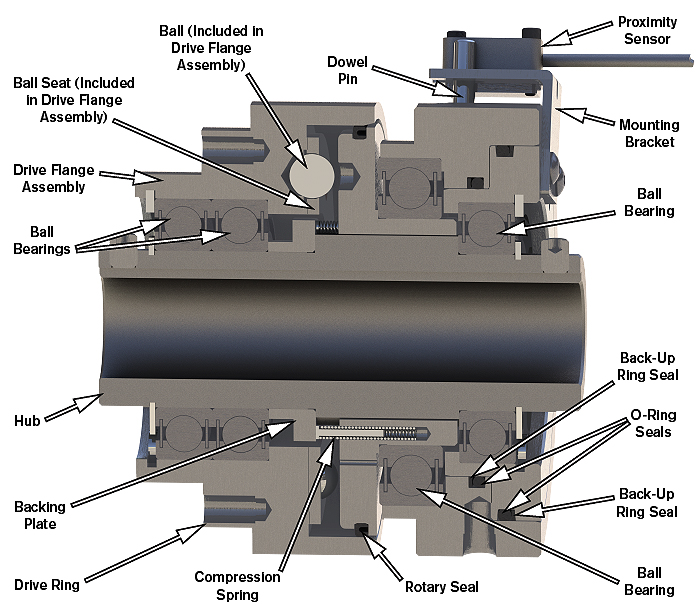
More advanced ball detent torque limiters use pneumatic technology instead of springs to engage the torque limiter. An advantage of the pneumatic approach is that adjusting air pressure to increase or reduce the set torque can remotely control the trip-out torque. Another advantage of pneumatically-engaged torque limiters is that a proximity sensor is used to detect an overload condition, signal the directional control valve to exhaust the air, disengage the torque limiter interface and, if desired, interrupt power to the motor.
Hydraulic torque limiters apply hydraulic pressure between the drive and driven element of the torque converter to connect the power source to the load. When the input load exceeds the desired release torque, the hydraulic pressure is no longer sufficient to connect the drive and driven elements; the driven element will begin to slip against the driving element. The operating pressure level accurately controls the release torque. Hydraulic torque limiters are primarily used in extremely high torque applications.
Magnetic and electronic designs
Magnetic torque limiters can provide advantages in certain niche applications. In this type of device, the drive and driven elements do not touch each other, but instead are connected together through electromagnets that exert force at a distance. Magnetic torque limiters do not wear, do not require lubricant and can be used at nearly any temperature. Additionally, magnetic torque limiters are used to reduce the transmission of torsional vibrations. On the other hand, magnetic torque limiters are expensive and limited to applications involving low levels of torque.
An alternative approach is to electronically monitor the torque output at the motor and apply a braking torque when an overage is detected. This approach is well suited to address situations where the load increases in a linear fashion at a relatively slow rate. But there are often many mechanical drive components between the motor and load that have a lot of rotating inertia. These components increase the time required to sense an overload and continue to drive the load even after a brake is applied to the motor. Thus, when torque suddenly jumps—because a part has broken and become jammed in a mechanism, for example—there is a good chance that the inertial energy stored in the drivetrain will damage the machine.
Application of torque limiters
The drive torque is the most important criteria for selecting a torque limiter. The torque limiter should be selected or adjusted to slip at a high enough torque to avoid unnecessary tripping, such as during start up of the machine (the point at which most applications experience the highest torque during normal operation). When the torque limiter is placed between the gearbox and the driven equipment, it protects both the gearbox and motor from overloads. Placing the torque limiter between the motor and gearbox protects only the motor from overloads.
Another consideration is that torque limiters provide longer service life if they are installed on a relatively low-speed shaft, such as between the gearbox and the load. On the other hand, a torque limiter that is positioned between the motor and gearbox can have a lower torque capacity because torque is usually lower on this side of the gearbox. It’s important to protect the most expensive part of the drivetrain—the gearbox—so torque limiters should be placed on the output side of the gearbox whenever possible.
One of the primary responsibilities of the machine designer is to protect against damage due to overloads. Mechanical torque limiters that help address this challenge are available in a wide range of styles and sizes to suit practically any application. Selecting the right torque limiter for the application can help protect against damage at a relatively low cost.
NEXEN
www.nexengroup.com
Leave a Reply
You must be logged in to post a comment.