

Inelta Sensorsysteme has added new model variants to its portfolio of ring force sensors. The sensor type, which acts as a measuring washer, is used to detect axially acting forces on screws, shafts or axles and is used, for example, to determine or monitor preload forces on screw connections. The ring force sensors in the […]
Sensors + Vision
New POSITAL TILTIX inclinometers have analog outputs

As part of its ambitious NEXTGEN program, POSITAL has released new members of its TILTIX inclinometer family with analog communications interfaces. The new versions are mechanically and electrically compatible with older models and share the same mounting footprint. POSITAL’s TILTIX inclinometers are used in motion control and safety assurance systems to measure a device’s orientation […]
Solenoid driver module is energy stingy

Magnetic Sensor Systems (MSS) has released the SDM840 Solenoid Driver Module as a complement to their series of solenoids and those of other manufacturers that includes tubular, open frame, low profile, hinged clapper, latching, and rotary solenoids. This compact, quiet 20 kHz pulse width modulated driver module measuring just 1.65 in. x 2.50 in. is […]
New magnetic angle sensors from Novotechnik

Novotechnik, U.S. has released the RFX 6900 Series of touchless rotary sensors. These magnetic sensors are designed for use in mobile, safety-related, and extreme environment applications. The housing of the RFX 6900 Series is anodized aluminum and sealed to IP 67 or IP 69, depending on the version, and it conforms to ISO 13849 for […]
A one-stop-shop for motion control demands in additive manufacturing
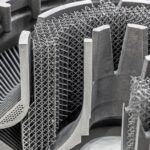
Additive manufacturing (AM) is crucial for manufacturers today because it enables the production of highly complex and customized parts that are difficult or impossible to achieve with traditional manufacturing methods. It offers increased design freedom, faster prototyping, reduced material waste, and the ability to create on-demand, decentralized production networks, all of which contribute to enhanced […]
Wiegand energy harvester enables new IoT technologies

UBITO, a member of the FRABA family of technology companies, has announced a development of Wiegand technology as an energy source for smart sensors. After more than two years of effort at FRABA’s R&D center in Aachen (Germany), a research team has demonstrated a prototype of a wireless sensor powered by Wiegand technology that could […]
Speed sensor optimizes main spindle on milling/turning machines

The new WMK 3010S rotational speed sensor from AMO is now available, and provides users of milling and turning machines a better option for operation of their main spindle. Besides providing speed data, the WMK 3010S also supports the capturing of operating status data of that spindle, thus optimizing many costs related to the operation […]
How do Hall effect sensors work and where are they used in motion applications?
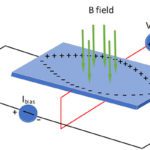
The Hall effect is an outcome of the Lorentz force at work. When a thin conductor (or semiconductor) has a steady flow of current running through it and a magnet is placed so that its magnetic field runs perpendicular to this current, the magnetic field of the current reacts to the magnetic field of the […]
Trends: Sensors on the front lines of changing industrial world
Sensors play a key role in many types of automation systems and machines, helping ensure they perform at their optimal level. Sensors are also at the core of the trend for increased condition monitoring and the larger program of predictive maintenance, which aims to reduce or eliminate sudden and catastrophic machine failure by actively monitoring […]
The benefits of integrating vision into machine control
Scalable PC-based automation, robust network solutions and open camera standards allow machine vision to ditch black boxes and increase throughput. Daymon Thompson U.S. Software Product Manager Beckhoff Automation LLC Machine vision has become indispensable for many tasks in quality inspection, track-and-trace and more. As costs decrease and capabilities increase, practically any machine in any industry […]