

Motor operators in all industries are staying ahead of the curve in energy efficiency and environmental stewardship with ABB Baldor-Reliance SP4 motors. ABB’s SP4 technology meets the NEMA Super Premium efficiency level in a standard AC induction motor design operating across the line, independently of a variable speed drive. SP4 is ABB’s solution for a […]
AC Motors
New Simotics SD200 low-voltage, severe-duty AC motors with 75 to 800 hp output

Siemens announced the immediate availability of the Simotics SD200 severe-duty motor in frame size 440 as its latest offering in the low-voltage Simotics motor family. Providing high productivity and energy-efficient operation in all torque ranges, these new cast-iron NEMA motors are built to power pumps, fans, compressors, hoists, winders, and similar equipment in harsh environments. […]
Sizing a dynamic brake resistor

Dynamic brakes in electric motor drives divert rising DC bus voltage seen during load deceleration. Here we explain how to size the resistors that process that voltage. By Lawrence Kren | Contributing writer Dynamic brakes divert rising DC bus voltage to an appropriately sized resistor where that voltage is then dissipated as heat. This process […]
Pertinent operating conditions for ac gearmotors and motors

Nameplate values stipulate the limits at which a motor or gearmotor can safely operate. To operate the motor either over or under the nameplate rated limit can degrade motor performance and safety. Let’s now review some of these restrictions and the consequences of ignoring them. Tim Oliver, V.P. of Engineering • Bodine Electric Co. Operating […]
Brushless ac servo motors are IP67 sealed, feature Mil-Spec rating

Kollmorgen’s new EKM series of enhanced, high-performance, brushless ac servo motors are Mil-Spec 810E rated and IP67 sealed for duty in harsh environmental conditions. They are supplied standard with a stainless-steel shaft and chemical agent-resistant paint for reliable duty in harsh environmental conditions. The EKM brushless servo motors feature high power and torque density and […]
What is external device monitoring and how does it relate to machine safety?
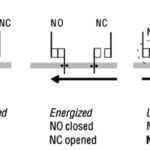
According to the Machinery Directive 2006/42/EC, technical protective measures should be used to reduce risks that cannot be avoided through safe design measures. These technical protective measures include safety devices such as door locks, covers, light curtains, and other equipment that monitors the machine movements. When the safety device controls and external device, such as […]
What machine safety functions address speed, and when are they used?

The Machinery Directive 2006/42/EC states that when a machine manufacturer is unable to eliminate the risks of potential hazardous situations (for example, mechanical hazards such as crushing or cutting) through safe design methods, the next step is to reduce the risks through technical protective measures. These technical measures include protective devices, such as door locks […]
New asynchronous motors from NORD feature optimized design for improved performance

NORD’s newly redesigned 100 frame motors are the first step in updating their asynchronous motor portfolio with an optimized electrical, mechanical, and visual design. The new 3 and 4 hp premium efficient motors offer a simplified assembly including the elimination of a copper rotor as the motors produce the same energy efficiency without it. This […]
New general-purpose, harsh-duty ac motors from AutomationDirect

AutomationDirect has added a host of new motors from Regal Rexnord to its existing portfolio, including two new series of Marathon motors and Leeson specialty motors. The new Marathon Globetrotter motors are high-quality 3-phase general-purpose motors that can be controlled by an inverter and are rated up to 200 hp. Globetrotter motors are offered in […]
ABB introduces the third generation of Baldor-Reliance RPM AC motors

Baldor-Reliance Generation 3 RPM AC motors deliver 1 to 1,750 hp, with customizable speed ranges in nearly any enclosure type. The motors are designed to handle the most demanding applications in industries such as chemical, oil and gas; plastics; HVAC; energy; forest products; metals and industrial automation. RPM AC motors are optimized for adjustable frequency […]