

Miniature and microgearing with high precision and tight tolerances is used to deliver accurate low-backlash power transmission complementing small electric motors in: • Medical devices and surgical tools • Aerospace rovers and satellites • Small motorized electronics. Such gearing is most often paired with small dc motors that is either brushed or brushless — with […]
Frameless motors versus torque motors

Frameless motors are rotor-and-stator subcomponent sets that aren’t prefixed in a traditional motor housing. Here we outline some of their benefits … along with those of torque motors. By Lisa Eitel | Executive editor Frameless motors don’t include a motor housing or output shaft (or shaft-support bearings) either. Instead, the OEM or design engineer works […]
ABB Baldor-Reliance SP4 motors represent the latest evolution of motor efficiency

Motor operators in all industries are staying ahead of the curve in energy efficiency and environmental stewardship with ABB Baldor-Reliance SP4 motors. ABB’s SP4 technology meets the NEMA Super Premium efficiency level in a standard AC induction motor design operating across the line, independently of a variable speed drive. SP4 is ABB’s solution for a […]
c3controls introduces new line of dc miniature circuit breakers

c3controls, a leading manufacturer of industrial control products, has launched a new line of Direct Current (DC) Miniature Circuit Breakers (MCBs), specifically designed for higher voltage applications with DC currents. The new line of Series 1110 DC MCBs feature an industry-best rating of 250V DC per-pole, far greater than the highest per-pole ratings currently available […]
HEIDENHAIN to exhibit at ATX West 2024

HEIDENHAIN has announced its participation in the upcoming ATX West 2024 trade show, taking place from February 6-8 at the Anaheim Convention Center in Anaheim, California. Known as a leader in precision measurement and control equipment, HEIDENHAIN is set to present its latest advancements in automation and intelligent robotics at this key event, recognized for […]
Microchip AVR EB microcontrollers reduce vibration in BLDC applications

As electronic devices evolve, more motors are being used across consumer, automotive and industrial markets. Many designers select Brushless DC (BLDC) motors to increase device longevity and lessen Noise, Vibration and Harshness (NVH). Historically, getting these benefits necessitated sophisticated control algorithms and waveforms outside the capability of cost-optimized controllers. Microchip Technology has launched its AVR […]
Festo Power Up initiative aims to transform machine building for food and beverage

The Festo Power Up initiative for food and beverage machine builders aims to spur the efficient adoption of electric automation and in the process support the development of the next generation of compact, flexible, energy efficient, and data-rich machines. Three pillars support the initiative. Machine builders now have the option of a Festo one-stop-shop of […]
New Delta Line Leo B2000 servomotor controller
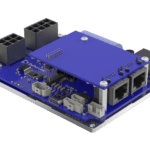
Delta Line has extended its Leo Drive family with the introduction of the new Leo B2000 drive. This new high-performance closed-loop servo drive controller is suitable for servo and BLDC motors. It has been designed with efficiency in mind and incorporates optimized control algorithms to provide the perfect trade-off between efficiency and performance. The Leo […]
Delta Line now sells 38BLF07 — its smallest frameless BLDC motor
Frameless brushless dc motors are on the rise thanks to industries such as robotics, aerospace, medical devices, and even handheld power tools … all contributing to a skyrocketing growth of this technology predicted to generate close to $14B by 2033. Appreciated for their space saving properties, high torque, smooth motion, and high efficiency, these motors […]
Delta Line offers motion components and systems for intralogistics

Delta Line is a global motion-solution manufacturer offering individual motors, actuators, and gearboxes as well as fully customized motion systems. Its portfolio includes brushed ironless and brushless DC motors, servo motors, integrated motors, stepper motors, linear actuators, gearboxes, encoders, and intelligent drives. Delta Line’s headquarters are in Switzerland and its U.S. subsidiary is based in […]