
The XTREME 6000 ZrO2 Series of full ceramic radial bearings from CeramicSpeed are designed to provide levels of performance in extreme environments beyond the capabilities of steel and even hybrid bearings. The complementing components of these bearings were carefully selected to provide the highest levels of performance in high temperatures, and adverse environments such as; […]
Bearings
Smart fixed flange bearings unlock predictive maintenance

igus has developed intelligent two- and four-hole fixed flange bearings with wireless sensing capabilities for wear detection, enabling condition monitoring and preventing costly machine breakdowns. Constructed from self-lubricating, high-performance plastic, the bearings feature an integrated abrasion sensor, thin circuit board and cableless battery supply. Wear interrupts the board’s conductor paths, causing the electronics to lose […]
How to calculate crossed roller bearing life (with various load types)

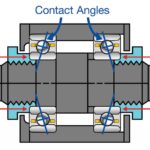
A crossed roller bearing is a type of rotary bearing that uses cylindrical rollers arranged in a crisscross pattern, with each roller oriented at a 90 degree angle relative to the one adjacent to it. This arrangement allows crossed roller bearings to withstand radial, axial, and moment loads, so they can often replace dual-bearing arrangements, for […]
Why is viscosity important for bearing lubrication?

Lubrication — or, more correctly, improper or insufficient lubrication — is one of the leading causes of equipment failures in industrial applications. Without it, sliding, rolling, or meshing surfaces experience significant friction, heat, and wear, leading to increased noise, loss of accuracy, and reduced equipment life. One of the most important characteristics of a lubricant […]
How to specify motion components for cleanroom environments: Part 2

In this two-part article, we cover the products, materials, and features that designers and engineers should specify when choosing motion components for cleanroom environments. In part 1, we looked at how to reduce particle generation due to friction between moving components. In this second part, we’ll look at another source of contamination — outgassing — […]
How to specify motion components for cleanroom environments: Part 1

In this two-part article, we cover the products, materials, and features that designers and engineers should specify when choosing motion components for cleanroom environments. In part 1, we look at how to reduce particle generation due to friction between moving components. Designers of automation systems are tasked with many competing demands, such as balancing cost and performance, […]
New igus robolink Apiro is modular kinematics system for automation

igus now sells components as part of a modular motion system called robolink Apiro. The systems could soon make designing and using individual automation setups more cost effective and much easier. With robolink Apiro, design engineers can choose from three lubrication-free worm gears for standard, inverted and linear movement. For users, the device offers setups […]
Rotary bearings: Summary of types and variations

Rotary bearings are common components in motion systems. They’re used in gearboxes, motors, pulleys, fans, pumps—virtually any time a shaft is rotating, rotary bearings are there to reduce friction and support radial or axial loads. The classification of rotary bearings begins with the type of bearing that supports the load—ball or roller. Within the ball […]
7 linear motion principles that electrical engineers should know

Electrical and controls engineers are normally tasked with selecting and integrating the electronic components that go into a motion control system, such as motors, drives, controls, feedback devices, and HMIs. In doing so, their primary concerns tend to be on making the various components communicate with each other, working through complex equations for drive tuning, […]
Six FAQs about bearings and choosing between oil and grease
Rotary bearings consist of smooth rollers or metal balls and inner and outer surfaces (races) against which the rollers or balls travel. These rollers or balls carry load carrier and let axes spin freely. Bearings typically encounter radial and axial load. Radial loads are perpendicular to the shaft, and axial loads occur parallel to the […]