

The new M5 Servo Series from Applied Motion Products is where power, precision, and cost-efficiency converge. The M5 Servo Series is engineered for high machine performance, exceptional torque output, and precise control. This series is optimized for cost-efficiency, ensuring peak capabilities without compromising performance. M5 servo drives implement accurate motor control algorithms. When paired with […]
Servo Motors
How to do instantaneous mode switching with servo motors
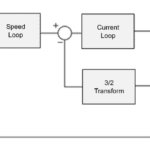
Instantaneous mode switching can help smooth transitions between different servo motor control modes in complex motion applications. Charan Bhamra Mechatronics Engineer EZ Motion In closed-loop servo control systems, there are three essential control modes; torque, speed, and position. Each of these parameters can be individually controlled depending on the application. While a single control mode […]
Kollmorgen expands its line of certified explosion proof servo motors

Kollmorgen announced ATEX certification and IECEx/cETLus listing for the explosion proof Goldline EBH 480 Vac servo motor. These new explosion proof approvals for the high-voltage Goldline EBH servo motor exemplify Kollmorgen’s commitment to advancing the state of the art in motion control and meeting the most demanding application requirements. The high-voltage Goldline EBH servo motor […]
Mitsubishi Electric Automation launches next iteration of MELSERVO-J5 servo product platform

Mitsubishi Electric Automation, Inc. has expanded its MELESRVO-J5 product family to include more options for OEMs and end-users. Cutting-edge technology, industry-leading performance, and advanced servo features allow users to unlock unused potential in their machines and factories. Compatible with CC-Link IE TSN, these products are ideal for high-speed, high-precision applications to reduce the total cost […]
Siemens next-generation servo-drive system upgrades mid-range product portfolio

With the SINAMICS S210 next generation servo-drive system, comprising a digitally native drive with wide range of corresponding motors and gearboxes, Siemens brings a new level of high-dynamic, motion control in mid-range operation to stand-alone and multi-axis machines, recently introduced to the North American manufacturing industry. This next generation servo-drive system introduces a new level […]
Servo motor meets the demands of medium to heavy washdown applications

Kollmorgen has launched its AKMA servo motor built specifically for durability, cleanability, and versatility. The motor employs a hardened anodized aluminum surface to offer machine designers a cost-effective hygienic option to stainless steel in medium to heavy washdown applications. The lightweight design of the AKMA motor makes it easy to install and maintain, and its […]
When is it time to switch to a servomotor?
The unpredictable global economy has derailed formally reliable supply chains, causing extra stress on both established products and systems currently in development. Prior to 2018, many engineers selected motors and motion control options based on what they used in the previous machine design. Today, engineers have the burden of factoring in product availability and price […]
Delta Line releases its new Servo Motor Family

Delta Line announces the release of its new Servo Motor Family, a catalog of low and medium-voltage motors that expands the Delta Line solution portfolio. Delta Line has been in motion control for more than 40 years and has first-hand experience garnered from its popular brushless slotted motor line. Flexible, configurable, and price-practical, these servo […]
Where brushless servo motors have the edge
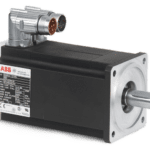
While there are many motor types to choose from, brushless servo motors have some advantages that make them the motor of choice in many applications. Bob Merrill Product Manager Servo motors ABB There are many motor types out there for engineers to choose from, and which is the best selection depends on each individual application. […]
Brushless ac servo motors are IP67 sealed, feature Mil-Spec rating

Kollmorgen’s new EKM series of enhanced, high-performance, brushless ac servo motors are Mil-Spec 810E rated and IP67 sealed for duty in harsh environmental conditions. They are supplied standard with a stainless-steel shaft and chemical agent-resistant paint for reliable duty in harsh environmental conditions. The EKM brushless servo motors feature high power and torque density and […]