
Frameless brushless dc motors are on the rise thanks to industries such as robotics, aerospace, medical devices, and even handheld power tools … all contributing to a skyrocketing growth of this technology predicted to generate close to $14B by 2033. Appreciated for their space saving properties, high torque, smooth motion, and high efficiency, these motors […]
DC Motors
Orbex Group offers custom brushless dc motors

Orbex Group has introduced two new custom products to its offering of precision motion solutions. These custom flat brushless dc (BLDC) motors provide smooth motion, high precision and excellent power density, as well as an integral gear reducer in a compact package. Both EC Family motors are part of assemblies that include a planetary gearbox, […]
New flat brushless dc motor features integrated encoder

The new DF45 brushless dc motors from Nanotec are now available with an integrated encoder. The new flat motors have a diameter of only 45 mm and, owing to their extremely compact design, are suitable for applications that require precise positioning in confined spaces. The 2-channel encoder has a resolution of 1,024 CPR and provides […]
AMETEK Haydon Kerk Pittman introduces new 57-mm size in IDEA Motor series

AMETEK Haydon Kerk Pittman (HKP), a business unit of AMETEK, has released a new size in its IDEA Motor series of brushless dc motors: 57 mm. This EC057B joins the 42-mm EC042B product introduced in 2019 and enhances a line of motors with integrated, programmable drives. The IDEA Motor combines a precision brushless servo motor […]
Which types of DC motors can be used as servo motors? (And a refresher on DC motor technologies)
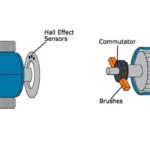
Servo motors are used in applications where precise control of position, speed, or torque is required. But many different types of motors can be considered servo motors — the defining feature of a servo motor is that it incorporates or reads feedback in a closed-loop system. In fact, although many servo applications use synchronous AC motors, […]
Successful lab experiments start with the right pipette motor
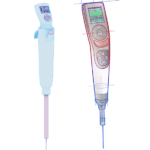
For medical lab applications, motor selection is integral to an electronic pipette’s accuracy and precision. Valentin Raschke Application Engineer Portescap Laboratory automation has always been a great fit for linear motion. Within certain laboratory devices, precision is required for moving samples into position, adding reagents, and withdrawing samples. Advancements in the linear force and speed […]
What are eddy currents and how do they affect motor performance?
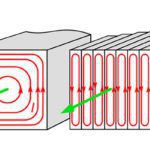
One of the electromagnetic principles that governs the operation of an electric motor is Faraday’s law, which states that when the magnetic environment of a coil of wire is changed — whether by moving the magnet and coil relative to each other or by changing the magnetic field — a voltage, or electromotive force (EMF), will […]
Portescap integrates driver into new mini brushless dc motor

Portescap’s new 22ECP miniature brushless dc motor includes an integrated driver to optimize motor performance and simplify installation. The new 22-mm diameter motor is just 35 mm in length and delivers 50 percent more continuous torque than comparable brushless slotless miniature motors, without compromising smoothness of operation or motor lifespan. The new motor is the […]
Electric motors from maxon help Emirates Team New Zealand win 36th America’s Cup

Emirates Team New Zealand has won the historical 36th America’s Cup that endured extra challenges — including COVID-19, race cancellations, and delays that caused interruptions and last-minute tactical changes. The Kiwis have retained the oldest trophy in international sporting history. Creating a boat from simulation and the use of AI technology were big risks for Emirates […]
Compact, energy-efficient brushless dc motor for high-speed applications

Portescap has added the 16ECS high-speed brushless motor to its Ultra EC mini brushless dc motor platform. These compact 16-mm motors are available in 36- and 52-mm lengths and provide high power while running at speeds of 75,000 rpm. The 16ECS is comprised of an enhanced magnetic circuit that reduces iron and recirculation losses that […]