

Kollmorgen has announced the latest update to its AKD2G servo drive. With the introduction of these new features, Kollmorgen has broadened its offerings to additionally support PROFINET IRT and Ethernet/IP with CIP Sync alongside CANopen, EtherCAT, and FSoE time-synchronized communication protocols. Each protocol is rigorously tested with a variety of motion controllers and certified by […]
Servo Drives
New servo motors and drives offer power, precision, and cost-efficiency

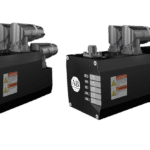
The new M5 Servo Series from Applied Motion Products is where power, precision, and cost-efficiency converge. The M5 Servo Series is engineered for high machine performance, exceptional torque output, and precise control. This series is optimized for cost-efficiency, ensuring peak capabilities without compromising performance. M5 servo drives implement accurate motor control algorithms. When paired with […]
Aerotech launches compact, economical single-and multi-axis servo drives

Aerotech Inc., has launched its new Automation1 XA4 and iXA4 PWM servo drives. These streamlined, economical single- and multi-axis panel-mounted servo motor drives include a full motion controller and I/O expansion options. Future options will include a four-axis version, I/O expansion and dc motor supply. “The new Automation1 XA4 servo drive series is a game-changer […]
AMC debuts new compact servo drive

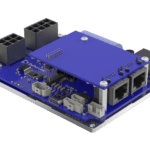
Advanced Motion Controls (AMC) has released the FE060-25-IPM FlexPro series servo drive. This state-of-the-art drive is designed to provide advanced control and power in one compact package, making it the perfect choice for a wide range of industrial and commercial applications. The FE060-25-IPM is equipped with IMPACT architecture, which combines exceptional processing capability and high-current […]
New Delta Line Leo B2000 servomotor controller
Delta Line has extended its Leo Drive family with the introduction of the new Leo B2000 drive. This new high-performance closed-loop servo drive controller is suitable for servo and BLDC motors. It has been designed with efficiency in mind and incorporates optimized control algorithms to provide the perfect trade-off between efficiency and performance. The Leo […]
Kollmorgen adds new servo drive to its AKD2G series

Kollmorgen’s new AKD2G 24A drive is designed for applications in precision multi-axis servo systems. The new single-cable optimized drive builds upon the strengths of the AKD2G portfolio including upgraded safety features, SD card backup and a graphical display with higher amperage to support more applications with higher power requirements such as conveyors and vertical lifting […]
Rockwell Automation launches new distributed servo drive
Rockwell Automation, Inc. has launched ArmorKinetix Distributed Servo Drives. This new distributed servo drive is an extension of the Kinetix 5700 platform and provides users with a scalable drive solution that helps deliver leaner, greener, and more powerful machine designs. Manufacturers are increasingly seeking scalable solutions that simplify their machine control architectures, minimize the number […]
Siemens next-generation servo-drive system upgrades mid-range product portfolio

With the SINAMICS S210 next generation servo-drive system, comprising a digitally native drive with wide range of corresponding motors and gearboxes, Siemens brings a new level of high-dynamic, motion control in mid-range operation to stand-alone and multi-axis machines, recently introduced to the North American manufacturing industry. This next generation servo-drive system introduces a new level […]
New compact, efficient drives feature EtherCAT, CANopen support

Copley Controls has introduced the Nano Series of digital servo drives. Featuring best-of-class power density and thermal management, these compact units integrate easily into autonomous guided vehicles (AGVs), autonomous mobile robots (AMRs), robotic joints and other automated equipment that need precise speed and position control despite limited space. “Designed with precision and performance in mind, […]
Celera Motion debuts ultra-small servo drives

Celera Motion’s new Denali Series are compact, ultra-fast servo drives designed for a variety of service robots, surgical robots, industrial grippers and lab automation applications. Denali is the latest addition to Celera Motion’s line of premium-performance Ingenia servo drives. “Robotics is a very competitive market, evolving rapidly and requiring best-in-class servo drive technology,” said Marc […]