
Updated December 2015 by Lisa Eitel || In robotics and material handling, end effectors are tools or devices connected to the end of a robot arm that accomplish some task. End effectors can be a range of types, including cutting tools and drills, welding tools, brushes, screwdrivers, vacuum cups and grippers.
Grippers are devices often used with pick-and-place robotic systems to pick up or place an object on an assembly line, conveyor system or other automated system. Fingered tooling or jaws are attached to grippers to grip or hold the object. Recently, robotic grippers have made headlines, thanks largely to breathtaking new prosthetics, smarter material-handling machines and fairly brisk robotic innovation.

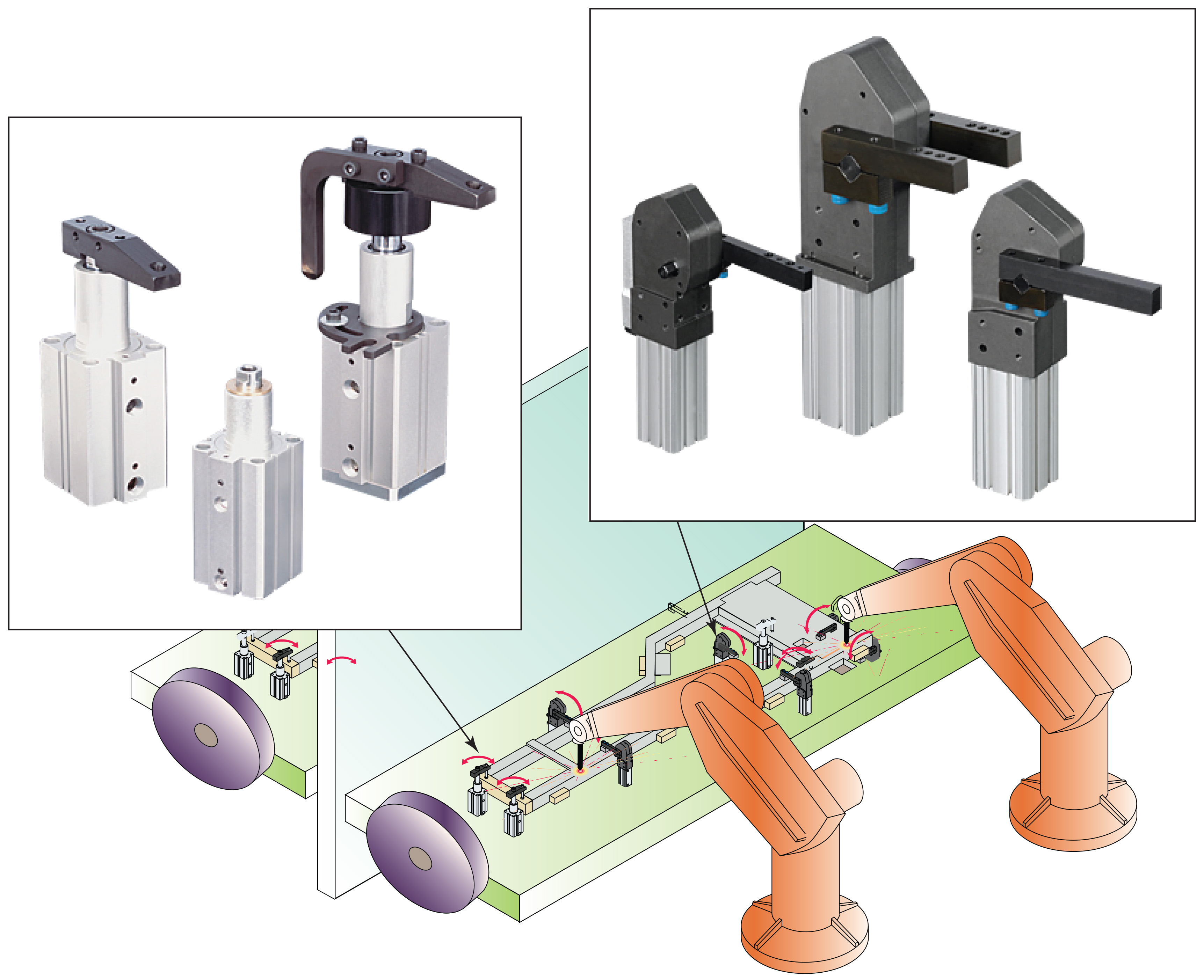
Grippers come in a variety of styles and powered designs. Three common types are parallel, three-finger and angled designs. The most common are parallel designs with two fingers that close on a workpiece to grip it or open it out by creating pressure on the inside. Three-finger designs hold the workpiece in the center, and have three fingers offset by 120°. Finally, angled designs feature jaws that work at a variety of different angle openings.
Ultimately, it’s the size, force and shape of the parts that the machine must grip that dictate the most suitable gripper style. For today’s industrial applications, gripper designs are increasingly diverse. Other grippers that don’t fall into neat categories include single-jaw grippers, bladder grippers that inflate against part ODs and IDs, and magnetic grippers.

In addition, three choices of power are available, the most common being pneumatic power and the least common being hydraulic designs. Traditional pneumatic grippers still dominate industrial-assembly and robotic applications. That’s because pneumatic grippers are reliable, come in myriad sizes and grip quickly. Electromechanical designs are the third common option.

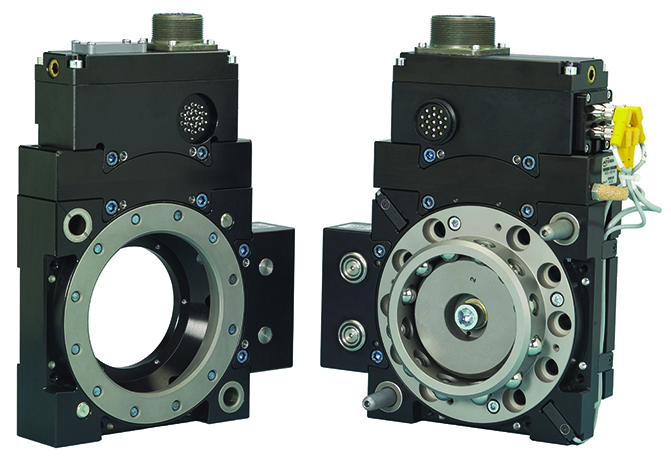
Electromechanical grippers use ballscrews, belts, or racks and pinions to connect to the jaw or finger that is touching or gripping the part. They are driven by a motor for tasks like loading and unloading machines to assembly lines. They can grip small parts, like an IC chip, up to very large pieces, such as a railroad wheel assembly greater than 3,000 lb. They are also ideal when tight precision is needed or when lifting larger, heavier items. Normally electromechanical grippers are made of aluminum and steel components, but some designs can be manufactured from composites like carbon fiber and other plastics.
Some specifics on electromechanical grippers
 Electromechanical grippers are most common in pick-and-place robotics to put items on assembly lines, conveyor systems, or other automated systems. Fingered tooling, or jaws, are attached to the grippers to grip or hold the object.
Electromechanical grippers are most common in pick-and-place robotics to put items on assembly lines, conveyor systems, or other automated systems. Fingered tooling, or jaws, are attached to the grippers to grip or hold the object.
They come in myriad styles and powered designs. Three common types are parallel, three-finger, and angled designs. The most common are parallel designs, with two fingers that close on a workpiece to grip it or open it out by creating pressure on the inside. Three-finger designs hold the workpiece in the center, and have three fingers offset by 120°. Finally, angled designs feature jaws that work at a variety of different angle openings (for example, 30°, 40°, and so on).
 In addition, three choices of power are available, the most common being pneumatic grippers and the least common being hydraulic designs, with electromechanical designs in between.
In addition, three choices of power are available, the most common being pneumatic grippers and the least common being hydraulic designs, with electromechanical designs in between.
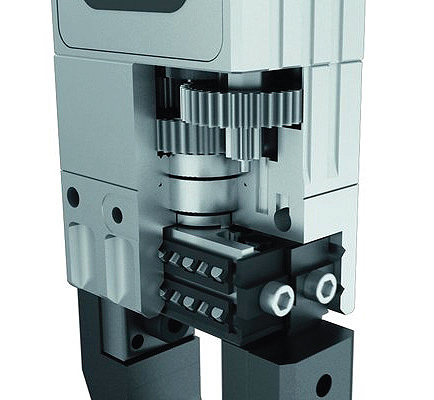
Electromechanical grippers use ball screws, belts or racks and pinions to connect to the jaw or finger that is touching or gripping the part. They are driven by a motor for tasks like loading and unloading machines to assembly lines. They can grip small parts like an IC chip up to very large pieces such as a railroad wheel assembly greater than 3000 lb. They are also ideal when tight precision is needed or when lifting larger, heavier items.
Normally electromechanical grippers are made of aluminum and steel components, but some designs can be manufactured of composites like carbon fiber and other plastics.
When selecting a gripper, consider the following:
• Part weight and size to be lifted
• Part material
• Clearance issues around the part that could interfere with the gripping part,
• The environment in which the gripper will be used — corrosive, food or beverage, and so on
• The motion path of the robot or linear device that is moving the gripper
• The power supply that will be available

Leave a Reply
You must be logged in to post a comment.