
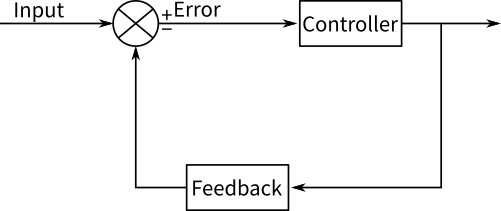
Load-position control is a form of closed-loop stepper-motor control.
It’s true that stepper motors can run open loop—as they don’t need sensor-feedback-based controller corrections. So, stepper-motor circuits are simpler and the motors are easy to implement … but if anything goes wrong in the application, the open-loop stepper won’t respond to the new condition. In contrast, closed-loop control lets designs use feedback data to correct for errors.
Traditional closed-loop stepper control
The most basic closed-loop feedback on stepper-based designs merely warns of missed steps or stalls. In slightly more sophisticated setups, the drive microsteps the motor for step-loss compensation. Controls generate direction and current-pulse commands to make the motor track target moves. With the help of an encoder, the controls detect missed steps and inserts makeup steps on the fly.
Read FAQ: What are stepper drives and how do they work? for more information.
A few caveats: Full-current input during all active operation makes stepper motors run under this control run hot. Some pulse trans can excite the motor resonance. Finally, output torque disappears when load demands more than pullout torque.
Higher-level closed-loop stepper control
Slightly more sophisticated is load-position stepper-motor control. With this closed-loop position control, feedback helps the drive microstep the motor to track target moves (and stay on a steady trajectory) even when loads vary. Designs that incorporate such controls must address pullout torque, resonance, and heat issues (of any basic stepper-based system) but the drive microsteps the motor with direction and current-pulse commands. More specifically, the controller monitors the system position and continually updates a move profile to make the motor track target moves. More after the jump.
Advantages of the closed-loop position control over more sophisticated brushless servomotor control are stepper motors’ better torque; finer resolution; and lower cost and complexity. Though they can’t replace servomotors in precision applications, load-position stepper-motor designs are also more reliable than simpler stepper-motor control setups. They’re indispensable where missed steps or restarts would degrade production output or put machinery at risk of damage.

Full servo control of stepper motors
Though a full review is beyond the focus of this FAQ, note that one stepper-control type is more sophisticated than load-position control — full servo control. Here, an encoder tracks the motor shaft to let controls hone a current vector to get the design to track target moves. Then the controls make the drive apply current to make the motor behave as a high-pole-count brushless motor. This way, control over motor torque with a PID position loop (not extra steps) makes the motor track target moves. What’s more, the drive outputs a variable current level so the motor gets only what it needs to position the present load … and no more or less. Benefits here include full torque control; the ability to coordinate multiple axes and track more sophisticated motion profiles; and tighter and quieter operation.
For more information, read:
NEMA 23 closed-loop stepper systems • Nanotec’s page on closed-loop integration
Leave a Reply
You must be logged in to post a comment.