
Microstepping is driving a stepper motor at less the one full step per movement. Under usual operating conditions, a stepper motor operates by turning one full step with every pulse of current. Microstepping allows a motor to make far finer steps. This done by having the controller and drive send the proper kinds of current pulses to the stepper motor.
A microstepping drive does not send a full pulse of current to the stepper motor to make it move. Rather various algorithms developed by manufacturers allow the drives to send only partial pulses to the stepper motor. As a result, the motor spin only a fraction of a step. Usual values of microstepping are 16 to 64 microsteps per one full step. For a 1.8° stepper motor, this makes for steps from 0.1124° to 0.028°.
Note that this value is theoretical. In practical applications, stepper motors do not get more accurate merely through the use of microstepping. Steps will still have error inherit because of the construction of the stepper motor. What microstepping is good for, then, is creating smooth, even motion. Read FAQ: How do stepper drives and motors get smooth motion and consistent torque at low speed? for more on this. More after the jump.
What microstepping drives do is send current to the motor as stepped sine waves. The steps in the sine wave pattern are the individual microsteps and the whole wavelength is a pulse that turns the motor one full step. This method of operation means the drive must be capable of outputting small bursts of current continuously.
Manufacturers have created a variety of ways of doing this, so be sure to check documentation to find out which method the drive in question uses.
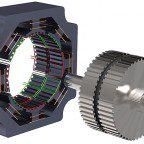
Note that variable-reluctance stepper motors cannot be driven with microstepping. Their construction techniques prevent the possibility, no matter what kind of drive is used. But permanent-magnet and hybrid steppers can be microstepped. For more information, read Micromo’s article: Microstepping Myths and Realities.


Leave a Reply
You must be logged in to post a comment.