
 In a recent interview, we had the chance to chat with Biren Patel, motion control engineering manager at maxon motor, about the company’s new EPOS4 next-generation positioning controllers.
In a recent interview, we had the chance to chat with Biren Patel, motion control engineering manager at maxon motor, about the company’s new EPOS4 next-generation positioning controllers.
This is a controller with two different power ratings and connector board to allow quick integration into machinery. The position controllers are suitable for dynamic control of brushed and brushless dc motors with up to 750-W continuous and 1,500-W peak power. Here’s what Patel had to say.
Eitel • Design World: What drove you to develop these new EPOS positioning controllers?
 Patel • maxon motor: A couple things led us to develop the new EPOS. We pride ourselves on staying up with technology and continually innovating. In addition, when Texas Instruments recently introduced a new processor, it pushed us to develop a new position controller, EPOS4.
Patel • maxon motor: A couple things led us to develop the new EPOS. We pride ourselves on staying up with technology and continually innovating. In addition, when Texas Instruments recently introduced a new processor, it pushed us to develop a new position controller, EPOS4.
This is a position controller that’s two and a half times faster than our EPOS2 controllers. It’s not going to replace those controllers but complement them.
Engineers may have an application that doesn’t need sophisticated position control, but something that’s fast. This is where maxon motor’s EPOS4 controller works — to satisfy applications that need something in between high-end control and lower-end DSP-based systems.
Eitel • Design World: How did maxon come up with the current controller design?
Patel • maxon motor: Over the years, we’ve had customers ask us to make controllers more compact and with a higher power density. That is another thing that drove us to develop the EPOS4.
Eitel • Design World: So how is the controller’s detachable hardware useful?
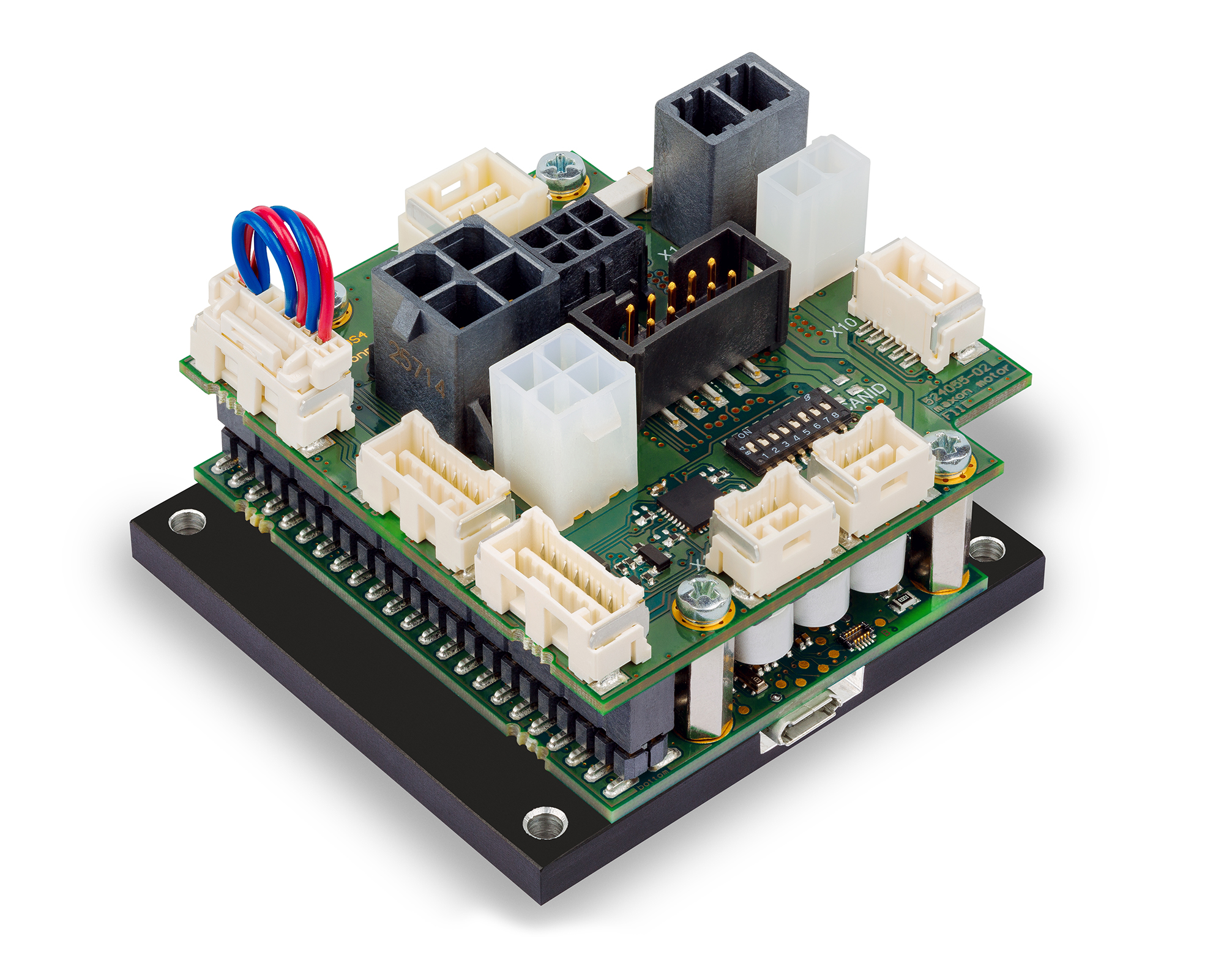
Patel • maxon motor: The controller’s pin headers are part of the main board, so are fixed … what is detachable is a compact board that goes on top of the main board for easy setup and quick builds of one-off applications.
EPOS positioning controllers for quick connections
Think about it: If an engineer is doing some feasibility analysis or proof-of-concept work, a traditional controller design would force that engineer to get in there and solder to the pins directly —and risk short-circuiting other pins or damaging the board itself.
In contrast, our EPOS4 accepts a compact board that engineers can buy and then place on the EPOS4 … and then easily use the connectors there to connect different types of motors and power supplies and other motion components to complete feasibility tests.
In fact, the modular design extends to other feature on the controller as well. We’ve added an optional heat spreader to boost controller-board capacity. We also recommend additional heat sinks to get higher current capacity at higher temperatures.
The base-model board without a heat sink outputs 8 A. With the heat spreader we can go to 15A continuous … add an additional heat sink and the controller can output 15A even in ambient environments exceeding 70 to 75° C, under full load.
Eitel • Design World: Did you have a team working on the design?
 Patel • maxon motor: Yes, in Switzerland we have a team of 40 engineers dedicated to the development of electronics. One group handles hardware. One group works on software. There’s even a group completely dedicated to development of firmware. They all work together to develop motion-control products.
Patel • maxon motor: Yes, in Switzerland we have a team of 40 engineers dedicated to the development of electronics. One group handles hardware. One group works on software. There’s even a group completely dedicated to development of firmware. They all work together to develop motion-control products.
Dedicated maxon motor teams also developed pieces of controller hardware — such as the controller’s heat spreader, for example. Other controller subcomponents we buy. For example, we buy the heat sinks from other manufacturers … so it’s also easy for customers to pick and purchase their own. We even list recommendations on product documentation to say if an application works at a given temperature, then the engineer can buy from the listed options.
Eitel • Design World: What kinds of networking options are there with the EPOS?
Patel • maxon motor: The EPOS2 and EPOS4 controllers have R232 USB and CANopen communication buses. The EPOS4 will include an option for EtherCAT communication as well. USB communication with the EPOS2 and EPOS4 is typically used for service and process interfacing. We have a high-end controller called the MAXPOS — for positioning — and that one only has EtherCAT connectivity.
In fact, the controller is a true EtherCAT slave device … and we see that as an important feature with everyone moving to the Ethernet. My personal opinion on this matter is that there’s a big push toward EtherCAT because everyone wants to have the ability to mention EtherCAT connectivity in their marketing … even beyond the real-world benefits of the standard. That’s another reason we gave the EPOS4 EtherCAT communication.
Eitel • Design World: Tell me about the software that goes with this controller.
Patel • maxon motor: We offer a EPOS Studio software (at no charge) so engineers can do more configuration and proof-of-concept feasibility analysis. We have a data recorder in the Studio software as well. It’s easy to use, and it includes a simple scope function. There are four channels that engineers can use to monitor things such as position — and then see how the command compares to what the motor’s actually doing.
Engineers can also use the software to monitor speed and current draw, and then check their work. For example, an engineer might design a linear-motion system based on a leadscrew, and then use EPOS Studio software to ensure it doesn’t draw more than a given amount of current — or ensure that it is capable of outputting a given amount of torque.
EPOS Studio software can read all these values and compare them. It’s very useful for configuring the drive — but again, it can also do a lot more. Users can just input simple moves and record all the data related to the motion output to get a better idea of how their system is working.
Click here for more information about the EPOS4 position controller. Otherwise, visit epos.maxonmotor.com.
Leave a Reply
You must be logged in to post a comment.