Traditional brushed DC motors are cylindrical in shape and have a stator with permanent magnets surrounding an armature made of windings. Cylindrical motors have a radial air gap and magnetic flux, with current running axially along the length of the motor. A special variation of the DC motor, known as a printed armature motor or pancake motor, takes advantage of a flat construction principle with an axial air gap and magnetic flux, with current that runs radially out from the center of the motor to its periphery and back. Their design and construction give pancake motors significant performance and reliability advantages over conventional brushed DC motors and make them suitable for high-end servo applications.
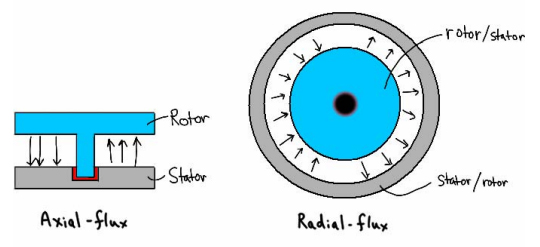
Image credit: Stack Exchange Inc.
Construction and operating principle
The armature windings of a pancake motor are printed on a disc (hence, the term “printed armature”). The disc is typically made from a non-magnetic, insulating material such as glass fiber, with copper conductors. The armature disc (rotor) is located between two thin stator discs containing permanent magnets. The magnets are arranged with alternating north and south poles so that the magnetic fields between adjacent pairs oppose each other.
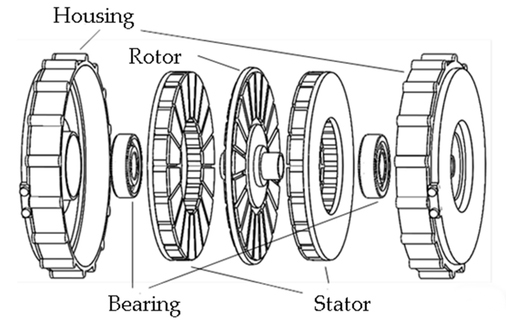
Image credit: Energies, Vol. 9, Issue 4: April 2016
This construction results in an axial air gap, with magnetic flux that also runs axially, along the length of the motor. Current, therefore, runs radially, from the center of the motor to the outer edges, and torque is produced around the axis of the motor, according to the principle of the Lorentz force.
When a conductor with current (the armature) is placed in a magnetic field that is perpendicular to the current, a force is generated on the conductor. The direction of the force is perpendicular to both the magnetic field and the current. This force, known as the Lorentz force, produces a torque that causes the motor to rotate according to the right-hand rule (or, more appropriately for electric motors, the left-hand rule). Because their operation is based on the Lorentz force, rather than on Faraday’s law as with conventional motors, pancake motors are sometimes referred to as Lorentz force motors.
Benefits of pancake motor construction
Image credit: Woodbank Communications Ltd.
In addition to axial construction, pancake motors have two other unique features: an ironless core and lack of a commutator. These construction principles give pancake motors several performance advantages over conventional cylindrical motors. First, because the armature contains no iron, there is no cogging effect, which is traditionally caused by the magnets in the stator attempting to align themselves with the iron in the rotor. Cogging makes it nearly impossible for conventional motors to achieve smooth motion, and pancake motors are the only motor type with no cogging or torque ripple.
Also, no iron means minimal inductance and no stored energy to be dissipated during commutation, so there’s no arcing of the brushes. Brush wear is a significant drawback to traditional brushed motors, but with no arcing, brush wear is greatly reduced and brush life is improved in pancake motors.
The low inductance of pancake designs also means that they have low electrical time constants, allowing current to flow very quickly into the armature for virtually instant torque production. Peak torque production is also higher in pancake motors due to their lack of iron. In conventional iron core motors, the magnetic field of the armature can demagnetize the permanent magnets, so peak current (and, therefore, peak torque) is limited to just 2 to 3 times the continuous rating. Pancake motors, without iron in the armature and with an axial magnetic field, can withstand peak current up to 10 times the continuous rating, for higher peak torque.
The second unique feature of pancake motors is that in addition to the copper conductors, the commutator is also printed on the armature. This design allows the brushes to run directly on the armature surface. The lack of a separate commutator ring, in conjunction with the flat overall design, make pancake motors very compact, especially when compared to conventional cylindrical motors. Their thin design, along with a low inertia (due to the absence of iron) allows pancake motors to achieve extremely fast acceleration and deceleration.
Pancake motors were originally designed to drive the capstans on tape machines, where a very compact footprint was required, along with the ability to start and stop rapidly. Their uses have expanded, but pancake motors are still found primarily in applications that require a slim profile, smooth motion with no torque ripple, extremely fast acceleration and deceleration, or high peak torque.
Feature image credit: Printed Motor Works
Leave a Reply
You must be logged in to post a comment.