
Both brushless DC (BLDC) and brushless AC (BLAC) motors are permanent magnet, synchronous devices. They both produce torque and speed through the interaction of a rotating magnetic field in the stator and permanent magnets on the rotor. But while they have many similarities, differences in their stator construction produce different back EMF waveforms and result in different operating characteristics.
Back EMF (electromotive force) is a voltage generated by the rotation of the motor. It opposes the applied voltage, according to Lenz’s Law, and reduces the current flowing through the coils. Back EMF will generally be sinusoidal if the power supply is AC and trapezoidal if the power supply is DC.
The stator of a BLAC motor (also referred to as a permanent magnet synchronous motor, or PMSM) has skewed magnets and overlapped windings that are sinusoidally distributed, which results in a sinusoidal back EMF waveform. The drive current, being AC, is sinusoidal in nature and closely matches the back EMF waveform. The combination of three-phase sinusoidal drive current and sinusoidal back EMF results in a very constant torque output, with virtually zero torque ripple. Sinusoidal waveforms also give BLAC motors high efficiency and minimal noise and vibration when compared to motors with trapezoidal current and back EMF.
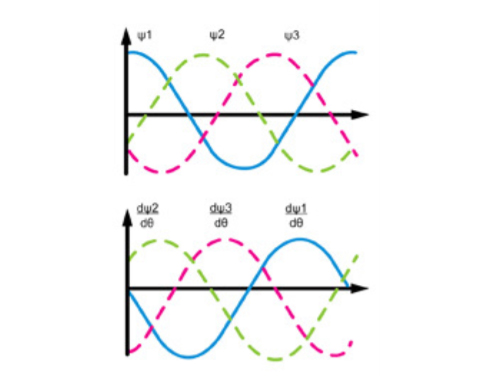
Image credit: ijstr.org
Sinusoidally wound motors can use sinusoidal commutation, in which a Hall sensor or feedback device is used to determine the rotor position and apply the correct commutation sequence. The goal of sinusoidal commutation is to generate a rotating current vector that has constant magnitude and is orthogonal, or perpendicular to, the rotor. (Recall that a vector has both magnitude and direction.) In order to do this, the rotor position must be determined with a high level of resolution, so resolvers or encoders are used more often than Hall sensors for rotor position detection.
Commutation is the process of applying current to the appropriate stator windings to maintain the correct angle between the stator and rotor (permanent magnet) fields.
In sinusoidal commutation, as speed increases, phase lag begins to play a part, taking the stator and rotor fields out of sync with each other. Field oriented control (FOC) avoids the speed limitations of sinusoidal commutation by directly controlling the current vector. In simple terms, this means that instead of modulating the current vector on the basis of sine waves, the vector’s magnitude and quadrature direction are determined relative to the rotor. This makes the current vector static and independent of motor rotation, similar to DC control, avoiding the speed limitations and heat generation that are experienced with sinusoidal commutation.
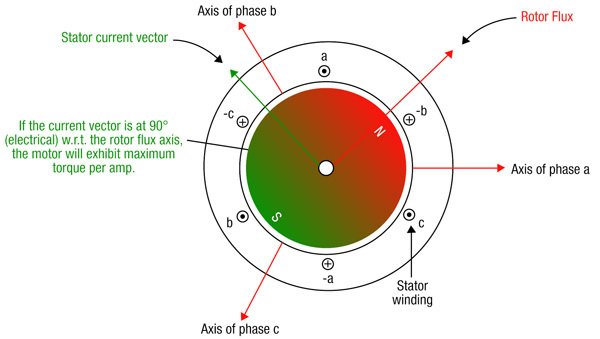
Image credit: Texas Instruments
While sinusoidal commutation provides smooth motion and high efficiency at slow speeds, field oriented control allows smooth motion and high efficiency to be achieved across a wide speed range.
For a more in-depth look at field oriented control of permanent magnet synchronous motors, Texas Instruments provides an excellent tutorial.
Leave a Reply
You must be logged in to post a comment.