
Brushless AC (BLAC) motors are driven with sinusoidal AC currents, and due to skewed magnets and sinusoidally distributed windings in their stators, they also produce sinusoidal back EMF. Sinusoidal commutation is a common way to control BLAC motors, as it provides a very consistent torque output with little torque ripple. But at high speeds, sinusoidal commutation begins to sacrifice motor efficiency. Another method, known as field oriented control (FOC) or flux-vector control, also generates sinusoidal waveforms and produces consistent torque, but it yields better motor efficiency, especially at high speeds.
Sinusoidal commutation
Torque output in any motor is maximized when the stator and rotor magnetic fields are orthogonal (at 90 degrees) to each other. Sinusoidal commutation works to generate a rotating current vector with a constant magnitude and direction that is orthogonal to the rotor. (Recall that vectors have both magnitude and direction.) To achieve this, two of three stator phase currents are generated, 120 degrees phase-shifted from each other, based on rotor position, which is provided by an encoder. The third is determined using Kirchhoff’s current law. The result is a smoothly rotating current vector with constant magnitude that is always orthogonal to the rotor.
Kirchhoff’s current law states that at any junction in an electrical circuit, the sum of currents flowing into the junction is equal to the sum of currents flowing out. In the case of a three phase motor, Ia + Ib + Ic = 0. So if two currents are measured, the third must be the negative sum of the first two in order to maintain a zero sum of the three.
Sinusoidal commutation provides smooth motion with very little torque ripple. But as motor speed increases, efficiency deteriorates. This is because with increasing speed, the frequency of the sinusoidal current command signals also increases, making it difficult for the current loop controllers to track the command signals. In addition, as speed increases, motor back EMF increases in frequency and amplitude. The result is phase lag between the stator and the rotor, taking the current vector out of the optimal 90 degree alignment with the rotor flux. This reduces the torque produced for a given current and decreases the motor’s efficiency.
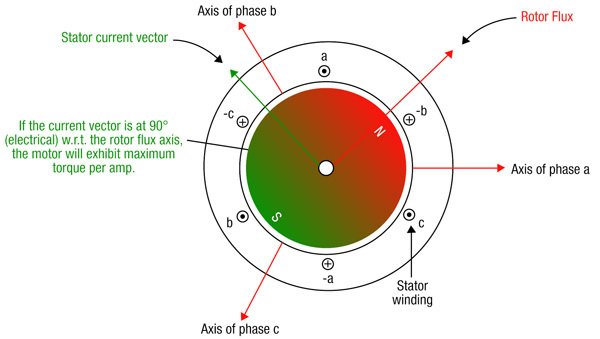
Image credit: Texas Instruments
Field Oriented Control
Where sinusoidal commutation is based on a three-phase system that is dependent on time and speed, field oriented control transforms this system into a two coordinate system—d and q—that is not dependent on time, similar to that of DC control. There are two inputs to FOC—the torque component (aligned with the q coordinate) and the flux component (aligned with the d coordinate).
First, in a manner similar to sinusoidal control, the current in two windings is measured (recall that current in one of the windings is not controlled—it is the negative sum of the current in the first two windings). Then, a Clarke transform is used to convert the three axes of current into a two-axis system. The resulting two-phase waveforms have the same amplitude as the original three-phase waveforms.
Next, a Park transform is used to convert the two-axis system from a fixed reference to a rotating reference frame that is in synchronization with the rotor flux. The result are the d and q values. The d axis current is aligned with the rotor flux, and the q axis current is orthogonal to rotor flux. Because it is orthogonal to the rotor flux, the q axis current is responsible for torque production. In other words, torque is increased by increasing the q axis current and decreased by decreasing the q axis current.
A separate PI controller is used for each axis, d and q, to read current error signals and amplify them to produce voltage to the motor. But because the voltages are on a rotating reference, an inverse Park transform is performed, which converts them back to a stationary reference frame. An inverse Clarke transform is then performed in order to convert the two voltages back into three values so they can be applied to the three motor windings.
While field oriented control seems more complex on the surface (and admittedly, it is more mathematically intensive), the decreasing cost of processing technology makes it a viable solution for many motion control systems. On the other hand, sinusoidal control is the preferred choice for simple, low-cost control of brushless motors.
Feature image credit: National Instruments Corporation
Leave a Reply
You must be logged in to post a comment.