

Red Lion’s new FlexEdge Intelligent Edge Automation Platform with HDMI allows engineers to quickly and effortlessly create real-time productivity scoreboards. As industries around the world digitalize their operation, the need to securely access and visualize data to power their performance in real-time is crucial. FlexEdge with HDMI, powered by Crimson, is designed with user-friendly configuration […]
I/O
EtherCAT I/O modules provide intrinsic safety in IP67 form factors

Beckhoff’s new EPX module series offers a compact option for Ex i signal acquisition from zones 0/20, 1/21 and Div. 1 as an addition to the wide range of EtherCAT Box modules. With robust IP67 protection, they enable direct and decentralized installation on machines and systems, even in harsh environments. This results in numerous advantages […]
NORD’s PROFIsafe module adds functional safety to drive systems
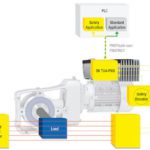
Functional safety is a fundamental component in drive systems. The SK TU4-PNS, known as the PROFIsafe module, provides comprehensive safety for the reliable operation of NORD drive systems. This PROFIsafe module is a drive-integrated solution for decentralized variable frequency drives that implements functional safety within the system to stop operation and avoid potential injuries or […]
New compact stepper motor I/O terminal from Beckhoff

The new EL7062 dual-channel EtherCAT Terminal from Beckhoff enables the direct connection of two stepper motors in the medium power range of up to 3 A and for a voltage range of 8 to 48 V. With flexible parameterization and minimized channel costs, the flexible motion interface is ideal as a low-cost drive for a […]
Robotic bartender powered by Arduino-compatible controller and BLDC servo motors
Teknic’s Robotic Bartender uses one of Teknic’s new ClearCore controllers (Arduino compatible) and six ClearPath integrated servo motors. A small team of engineers were challenged to demonstrate the flexibility and power of the new controller. They came up with a robotic bartender that lets you order one of 130,000 possible drink combinations for the perfect […]
Teknic launches new EtherNet/IP Motion and I/O Controller
Teknic recently launched ClearLink, a Motion and I/O Controller offering users of EtherNet/IP compatible PLCs, such as CompactLogix, MicroLogix, and ControlLogix. It provides a new way to save space, money, and wiring in automated machinery. ClearLink provides 4 axes of motion control, a serial port, 13 configurable digital & analog I/O points, and expandable I/O […]
Inductive proximity and magneto resistive sensors enhance IoT4.0 connectivity for Nexen brake families

Nexen Group, Nexen Servo, Rail, and ZSE brake lines now have Industry 4.0 connectivity sensor options to enhance machine efficiency. Multiple sensors integrated into the brake families provide information about brake operation and health to the control system network. The sensors used in the spring-operated air-released ZSE brakes provide operation information such as brake engagement […]
Teknic launches multi-axis motion and industrial I/O controller
Teknic recently launched ClearCore, a low-cost, multi-axis, motion and industrial I/O controller offering OEMs a new way to save space, money and wiring in their automated machinery. ClearCore provides four axes of motion control, Ethernet, serial, USB, and wireless expandability along with 13 configurable digital and analog I/O points. By registering their application with Teknic, […]
Bosch Rexroth adds new offerings to its ctrlX AUTOMATION platform

Bosch Rexroth has added several new offerings to its recently introduced ctrlX AUTOMATION machine control platform. The new offerings include ctrlX SAFETY, ctrlX I/O and ctrlX SERVICES. These offerings expand the overall ctrlX AUTOMATION system functionality, with more capabilities planned in the near future. ctrlX SAFETY ctrlX SAFETY is the fastest and most compact safety […]
Beckhoff EL51xx EtherCAT Terminals enhance incremental signal analysis

Beckhoff Automation has introduced new EL51xx EtherCAT Terminals with built-in incremental signal analysis functionality. Incremental encoders have become indispensable in many applications due to their compactness and low price points. Beckhoff meets this important need with the comprehensive EL51xx series for analysis of 5 V incremental encoders via RS422 and TTL signals. These four new high-performance […]