If you put two magnets in close proximity to each other, you know that they’ll experience an attractive force when opposite poles are near each other and a repulsive force when like poles are near. If you hold one magnet stationary and rotate the other, pole-over-pole, the rotating magnet will tend to stop when its opposite pole lines up with the stationary magnet, requiring extra force (from you) to keep it moving. And when its like pole lines up with the stationary magnet, the repulsive force will be so strong that you almost can’t prevent it from spinning.
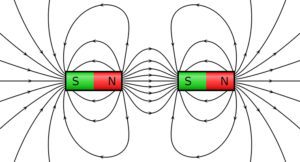
In a similar manner, when the rotor poles of a permanent magnet AC (PMAC) motor line up with the steel teeth of the stator, the reluctance of the magnetic path is minimized and the rotor wants to remain in this position. The additional torque required for the rotor to move from this position of least resistance causes the motor to turn in a jerky and uneven manner. This fluctuating force is referred to as “cogging.” In PMAC motors, cogging typically occurs at startup and when the motor runs at low frequencies (2 to 6 Hz). In addition to uneven motion, it can also cause motor vibration and audible noise.
The tendency of the motor to experience cogging, however, depends on the type of drive that is used. Of the three most common types of AC drives (also referred to as variable frequency drives, or VFDs), the current source inverter (CSI) and voltage source inverter (VSI) designs most often result in cogging, while the pulse-width modulated (PWM) type does not. Here’s why…
CSI drives are fed with constant current and output an adjustable, three-phase current to the motor. The output current has a trapezoidal shape, with periods when no current flows. These gaps in current cause the motor rotor to “search” for the next magnetic field in the stator. At low speeds, this results in uneven or “jerky” rotation of the motor shaft.
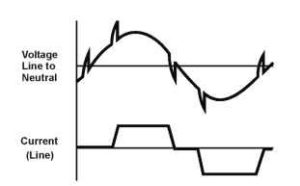
Image credit: what-when-how.com
VSI drives are fed with constant voltage and output three-phase AC voltage with adjustable magnitude and frequency. The output voltage waveform consists of six steps. In a manner similar to the trapezoidal output of a CSI drive, this six-step waveform causes the rotor to search for the next magnetic field in the stator, which produces a jerky motion of the motor shaft.
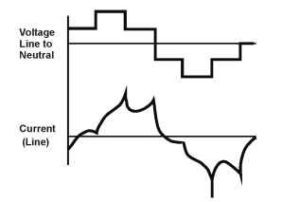
Image credit: what-when-how.com
PWM drives produce variable amplitude and frequency voltage, with power switches (typically IGBTs) that control the voltage to produce a nearly sinusoidal waveform.Unlike the peaks and notches inherent in the output of CSI and VSI drives, the smooth output of the PWM drive eliminates motor cogging. Share on X Unlike the peaks and notches inherent in the output of CSI and VSI drives, the smooth output of the PWM drive eliminates motor cogging.
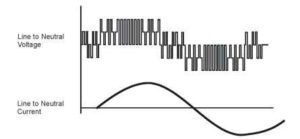
Image credit: what-when-how.com
Leave a Reply
You must be logged in to post a comment.