
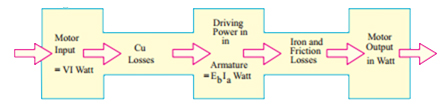
DC motors, like all machines, experience some losses when converting electrical power to mechanical power. (Note that in generators, mechanical power is converted to electrical power, but the losses experienced are the same.) While there are several ways in which manufacturers and experts group losses, one common method is to divide them into five categories: mechanical, magnetic, copper, brush, and stray losses.
Because mechanial losses and magnetic losses are approximately proportional to the motor’s rotational speed, they are often taken together and referred to as rotational losses.
Mechanical losses
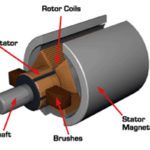
As their name suggests, mechanical losses are caused by movement of the motor. These include the friction in the motor bearings, friction between the brushes and the commutator, and drag on the rotor caused by turbulence of the air around it (sometimes referred to as windage loss). Mechanical losses increase with motor speed, but if speed is constant, these losses can be assumed to be constant.
Magnetic losses (aka core losses or iron losses)
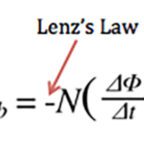
These losses are associated with magnetic paths of the motor. Magnetic losses include hysteresis losses, caused by the changing polarity of the flux in the core, and eddy currents, which are induced in the steel core by the changes in flux polarity. Magnetic losses are constant if the field current and speed are constant.
Copper losses (aka electrical losses or winding losses)
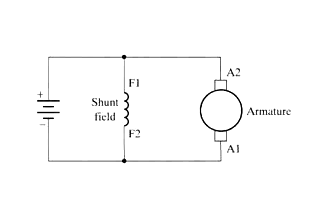
These losses can be referred to by many names, including the term “I2R losses,” since they’re caused by the resistance of the field and armature windings. For both the field and the armature, copper losses are equal to the square of current times the resistance of the current’s path.
Brush losses
During commutation, some losses occur between the commutator and the brushes. The magnitude of brush losses depends on the voltage drop at the contact point and on the armature current. Note that brush losses are sometimes included in the category of stray load losses.
Stray load losses
Losses that cannot be easily accounted for are generally lumped into the “stray load” category. Common examples are short-circuit currents during commutation and flux distortion due to armature reaction.
Motor design is the primary influencer of rotational losses, and although they’re not easily controlled by the user, it’s important to understand these losses, as they have a significant impact on motor efficiency.
Feature image credit: electrical4u.com


Leave a Reply
You must be logged in to post a comment.