
A DC motor can be constructed in various ways, and each design has specific performance characteristics, particularly regarding speed and torque production. The rotor is basically the same in all DC motors, being made of windings that generate an electromagnetic field when current passes through them. But the stator can be made of either permanent magnets (for a permanent magnet DC motor) or coil windings (for a wound DC motor). While permanent magnet DC motors are relatively simple in construction and lower cost than those with wound stators, their torque output is limited, and the magnets tend to degrade over time. This is why DC motors with wound stators are more commonly used for industrial applications.
There are three sub-types of wound DC motors, defined by how the rotor and stator windings are connected—parallel wound (also known as shunt wound), series wound, and compound wound (a combination of shunt and series designs).
Shunt wound
In a shunt wound DC motor, the armature (rotor) and field (stator) windings are connected in parallel. Thus, the motor current is split into two parts—current through the armature and current through the field: Itotal = Ia + If. The field (shunt) windings are made of a small diameter wire and have many turns. This means the windings have a high resistance, and the current that can be drawn at startup is relatively low.
Image credit: National Instruments
In electrical terminology, a parallel circuit is referred to as a shunt. Therefore, DC motors in which the armature and field windings are connected in parallel are called DC shunt motors.
Any DC motor will experience a decrease in speed when a load is applied, which causes the back EMF to decrease. The reduction in back EMF increases the net voltage, since the supply voltage remains constant.
Enet = E – Eb
Where:
Enet = net voltage
E = supply voltage
Eb = back EMF voltage
The net voltage increase causes the armature current to increase, which increases the motor torque. This additional motor torque increases speed enough to compensate for the slowdown that occurred due to loading. However, in a shunt wound motor, the torque is limited by the amount of current the armature can withstand. For this reason, shunt wound DC motors are used in applications where the required starting torque is low, but good speed regulation is important.
Series wound
In a series wound DC motor, the armature and field windings are connected in series, and the current through them is equal: Itotal = Ia = If. The field windings are thicker diameter, with fewer turns than in a DC shunt motor, so the resistance of the windings is lower. This allows the series motor to draw a large amount of current and produce a high amount of torque.
Image credit: National Instruments
Like a shunt motor, as a load is applied to a DC series motor, the motor speed decreases, which reduces the back EMF and increases the net voltage. However, in a series wound motor, the increased voltage causes both the armature and field currents to increase. This allows the series motor to produce very high torque on startup, for short durations. (Operation of the motor at high torque—i.e. high current—for more than a few minutes can damage the coils.)
Also, the current of a series motor will eventually reach a point where it causes saturation of the magnetic field and the motor becomes incapable of bringing the speed back to the value its pre-loaded value. Thus, series wound motors are used for applications that require high startup torque for short durations, without the need for speed regulation.
Compound wound
As the name suggests, a compound wound DC motor is a combination of series and shunt wound designs, with performance characteristics of both. A compound motor has both a shunt winding, with smaller diameter wires and many turns, and a series winding, with larger wires and fewer turns.
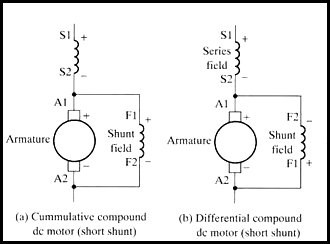
Image credit: National Instruments
The windings can be either cumulative (the series windings aid the shunt windings) or differential (the series windings work against the shunt windings). Compound designs have a starting torque that is higher than shunt wound designs, but lower than series wound DC motors.
A particular drawback of series wound motors is that they can enter a runaway condition (unlimited speed increase, to the point that the motor begins to literally break apart) if operated with no load. The shunt winding in a cumulative compound motor avoids this possibility by preventing the motor from gaining unlimited speed if the load is removed. While differential compound motors provide good speed control, they have few practical applications, since the characteristic of windings working against each other is not generally desirable.
Leave a Reply
You must be logged in to post a comment.