
Servo systems are applied in a wide range of applications, from intermittent operations that require high torque output for quick acceleration and deceleration — such as pick-and-place from a conveyor — to processes that call for nearly uninterrupted operation with constant speed and torque requirements — such as printing, roll feeding, and labeling. Given these dissimilar application requirements and the effect that torque, current, and duty cycle have on servo system performance, it’s easy to see why one type of servo drive or motor doesn’t fit all applications.
A key factor in servo system performance is heating, or more specifically, the ability of the motor and drive to dissipate heat to avoid damaging the motor insulation and drive electronics. There are a variety of causes for excessive heat generation, but aside from misapplied or poorly maintained products, operating at peak torque (and, thus, peak current) is one of the most significant factors.
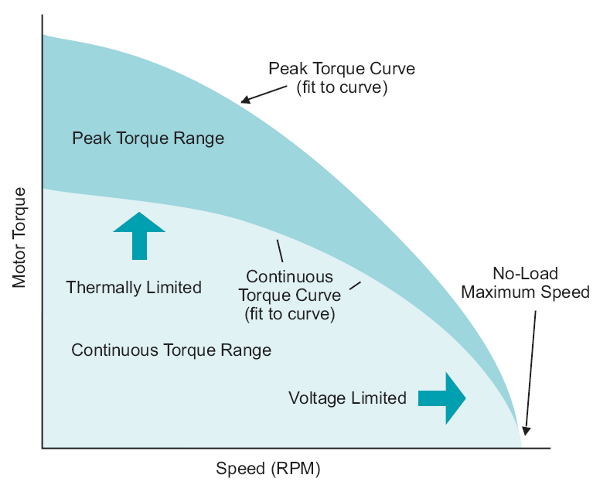
Recall that the torque curve for a servo motor and drive combination includes two operating ranges: continuous torque and intermittent (peak) torque. The continuous torque range shows the torque the motor and drive can produce indefinitely at a given speed and is the basis for evaluating the RMS torque required by the application.
Peak torque is the maximum torque the motor and drive can produce at a given speed and requires maximum current from the drive. To avoid overheating, the peak torque value is allowable only for a short amount of time — typically a few hundred milliseconds.
Accordingly, servo applications often fall into two categories:
• Servo applications that involve very rapid acceleration and deceleration … and therefore have high peak torque requirements
• Servo applications that require good continuous torque characteristics with moderate peak torque demands. The first type of application is referred to as pulse duty, and the second type is referred to as continuous duty. To address the disparity in performance requirements between these different applications, some manufacturers offer two variations of servo drives and motors: pulse duty versions and continuous duty versions.
Pulse-duty servo drives and motors
Pulse-duty servo drives and motors are designed to perform well in applications that involve very rapid acceleration and deceleration rates, and in turn, have high peak torque requirements. Accordingly, pulse duty servo drives have a high current overload rating, while pulse duty motors have lower inertia than conventional designs, which reduces the amount of torque (and thus, current) required for demanding move profiles.

Continuous-duty motors and drives
On the other hand, continuous duty versions are designed to produce relatively higher torque at higher speeds on a continuous basis, with moderate peak torque capabilities. Thus, the torque curves for continuous duty drives and motors have larger continuous operation areas.


Note: Root mean square torque (RMS torque) is a calculated value based on the torque required during each phase of the motion profile (acceleration, constant velocity, holding, deceleration, and so on) and the duration of each.
RMS torque is a time-weighted average — in other words, it is the amount of torque that (if produced continuously) would generate the same level of heating as the various torque levels and durations the motor experiences over its actual duty cycle.
The purpose of calculating RMS torque is to ensure that overheating doesn’t occur during normal motor and drive operation.



Leave a Reply
You must be logged in to post a comment.