
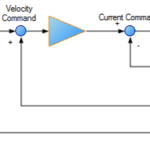
Updated November 2019 || A servo motor, when coupled with a feedback device, servo amplifier, and error-correcting control loops, can maintain a tightly controlled position, torque, or speed in applications that require closed-loop operation and the ability to respond to disturbances.
But another benefit of servo motors is their ability to produce significant torque over a wide range of speeds.
So the servo motor torque curve, which depicts the amount of torque a motor can produce over its range of operating speeds, is one of the most useful tools in servo motor sizing and selection.
The servo motor torque curve shows two operating zones — continuous and intermittent. The continuous operating zone encompasses the combinations of torque and speed that the motor can produce indefinitely.
When evaluating whether an application lies within the continuous duty zone, the motor’s root mean square (RMS) torque is used. RMS torque takes into account the varying torque requirements during the motor’s full duty cycle — including acceleration, constant velocity, deceleration, and dwell — as well as the amount of time that each level of torque must be produced. The purpose of RMS torque is to determine the torque value that, if it was produced continuously by the motor, would result in the same level of motor heating as all the various torques and durations the motor experiences during its duty cycle.
Ambient temperature also affects how quickly the motor will reach its thermal limit, and therefore, its continuous torque rating. If the motor will be operated in an area with an ambient temperature greater than that specified by the manufacturer, the servo motor torque curve will need to be adjusted (derated) accordingly. Conversely, if the ambient temperature around the motor is well below the ambient temperature specified by the manufacturer, the motor’s continuous torque rating may be increased.
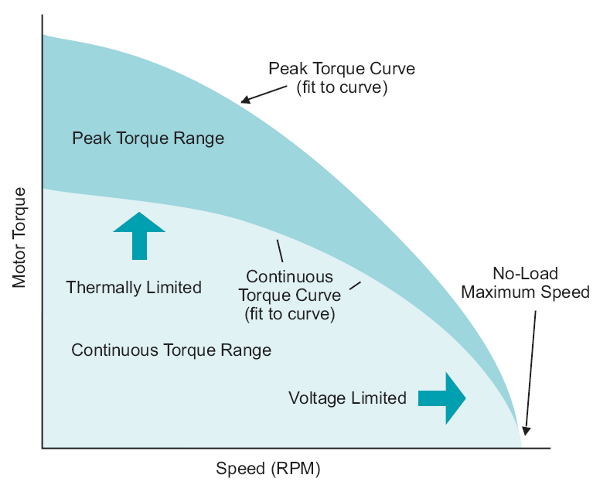
Image credit: Moog Animatics
Servo motor torque curves are relatively flat up to the motor’s maximum speed, unlike stepper motors, whose torque drops sharply beyond a certain operating speed.
The maximum torque required by the motor is typically the sum of torque during acceleration, torque due to the load, and torque to overcome friction. Because maximum torque is required for only a short amount of time, it can fall outside of the motor’s continuous operating zone, but must fall within the intermittent duty zone.
However, there are two caveats when considering the application’s maximum and its relationship to the motor’s intermittent operation zone:
1) The duration of maximum torque must fall within the time limit defined by the motor manufacturer for intermittent operation
2) Both the maximum torque and maximum speed should fall within the intermittent zone. If either parameter lies outside the motor’s operating limits, damage to the motor could occur.
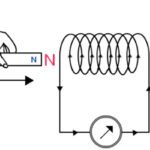
The maximum speed of the motor is limited by voltage … or more specifically by back EMF voltage. Back EMF is generated by the motor’s rotation and opposes the applied voltage. As speed increases, so does back EMF, and at some point, the back EMF can reach or exceed the voltage supplied by the drive.
Note that the servo amplifier (aka servo drive) can limit the motor’s maximum operating parameters, so torque-speed curves are often developed for specific motor-amplifier combinations. Using a different amplifier than that specified for the torque-speed curve could change the motor’s continuous and intermittent operation limits.


Leave a Reply
You must be logged in to post a comment.