
AC motors are often used in equipment that runs at constant speed regardless of load, such as fans, pumps, and conveyors. But when speed control is required, an AC motor is paired with a variable frequency drive (VFD), which regulates the motor’s speed by using one of two control methods — scalar control or vector control — to vary the frequency of the supplied voltage.
A scalar is a quantity that has only magnitude, such as mass or temperature. A vector is a quantity that has both magnitude and direction, such as acceleration or force.
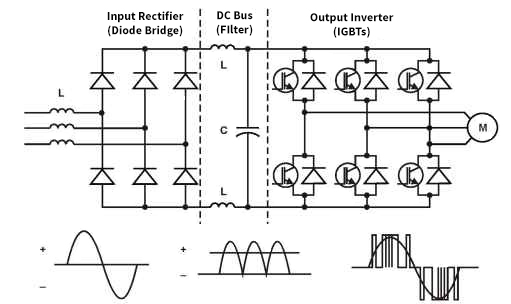
Image credit: what-when-how.com
Scalar control methods
Scalar methods for VFD control work by optimizing the motor flux and keeping the strength of the magnetic field constant, which ensures constant torque production. Often referred to as V/Hz or V/f control, scalar methods vary both the voltage (V) and frequency (f) of power to the motor in order to maintain a fixed, constant ratio between the two, so the strength of the magnetic field is constant, regardless of motor speed.
The appropriate V/Hz ratio is equal to the motor’s rated voltage divided by its rated frequency. V/Hz control is typically implemented without feedback (i.e. open-loop), although closed-loop V/Hz control — incorporating motor feedback — is possible.
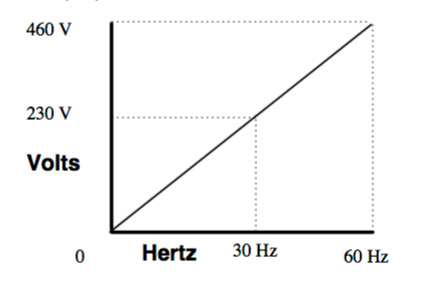
Image credit: Square D
V/Hz control is simple and low-cost, although it should be noted that the closed-loop implementation increases cost and complexity. Control tuning is not required but can improve system performance.
Speed regulation with scalar control is only in the range of 2 to 3 percent of rated motor frequency, so these methods aren’t suitable for applications where precise speed control is required. Open-loop V/Hz control is unique in its ability to allow one VFD to control multiple motors and is arguably the most-commonly implemented VFD control method.
Vector control methods
Vector control — also referred to as field oriented control (FOC) — controls the speed or torque of an AC motor by controlling the stator current space vectors, in manner similar to (but more complicated than) DC control methods. Field oriented control uses complex mathematics to transform a three-phase system that depends on time and speed to a two-coordinate (d and q) time-invariant system.
The stator current in an AC motor is made up of two components: the magnetizing component (d) of the current and the torque-producing component (q). With FOC, these two current components are controlled independently (each with its own PI controller). This allows the torque-producing component, q, to be kept orthogonal to the rotor flux for maximum torque production, and therefore, optimum speed control.
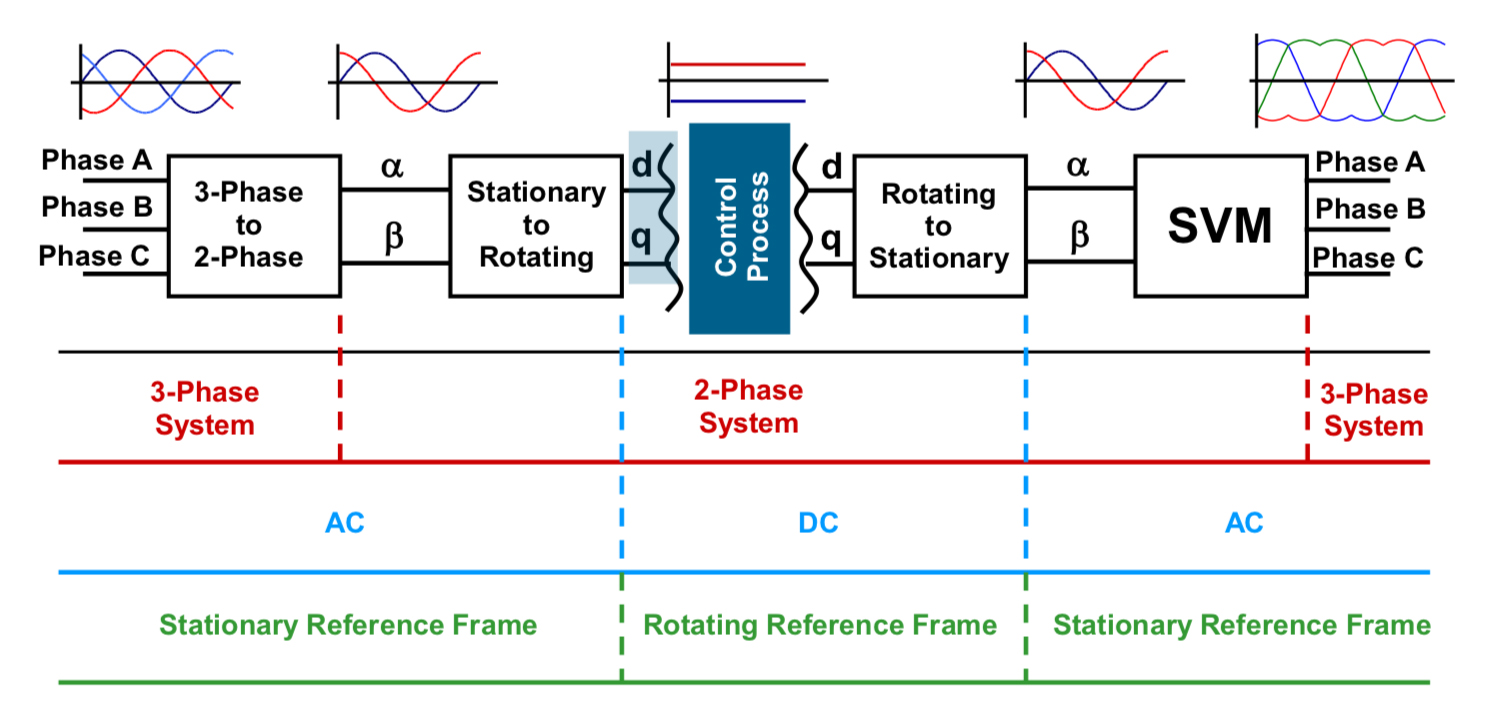
Image credit: Freescale Semiconductor
Like scalar methods, vector VFD control methods can be open-loop or closed-loop. Open-loop vector control (also referred to as sensorless vector control) uses a mathematic model of the motor operating parameters, rather than using a physical feedback device. The controller monitors voltage and current from the motor and compares them to the mathematical model. It then corrects any errors by adjusting the current supplied to the motor, which adjusts the motor’s torque production accordingly. With senseless vector control, it’s important to have a very accurate mathematical model of the motor, and the controller must be tuned for proper operation.
Closed-loop vector control uses an encoder to provide shaft position feedback, and this information is sent to the controller, which adjusts the supplied voltage to increase or decrease torque. This is the only method that allows direct torque control in all four quadrants of motor operation for dynamic braking or regeneration.
Vector control methods are more complex than scalar VFD control methods, but they offer significant benefits over scalar methods in some applications. For example, open-loop vector control enables the motor to produce high torque at low speeds, and closed-loop vector control allows a motor to produce up to 200 percent of its rated torque at zero speed, useful for holding loads at standstill. Closed-loop vector control also provides very accurate torque and speed control for industrial applications.



Leave a Reply
You must be logged in to post a comment.