
Incremental encoders typically use two square-wave signals in quadrature (out of phase by 90 degrees) to track position and direction of motion. But because they only track incremental position (not absolute position) they’re not able to determine the true position of the motor and connected equipment after a shut-down or power loss. So most incremental encoders also include a third signal — typically referred to as the index pulse — which helps determine the actual position of the motor during startup.
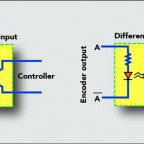
The two primary signals are produced on the A and B channels, and the index pulse is produced on a third channel, commonly referred to as the “Z” or “I” channel.
Unlike the primary signals, which produce continuous square waves, the index pulse is a single pulse produced once during each shaft rotation, indicating a fixed, discrete position in the mechanical rotation (or linear movement) of the encoder. Therefore, the index pulse can be used not only to determine the position of the motor during startup, it can also be used as a counter to track the number of shaft rotations, or to reset a position counter.
The index pulse is also referred to as a marker pulse, home, or zero reference.
The index pulse in an incremental encoder can be either gated or ungated. Gating refers to whether the pulse is referenced to, or aligned with, one or both of the primary channels — A and/or B. An ungated index pulse typically has a length of 360 electrical degrees or larger, and the edges of the pulse have no definite correlation to either the A or B channel. A gated index pulse is truncated to either 180 or 90 electrical degrees and provides a more accurate reference position.
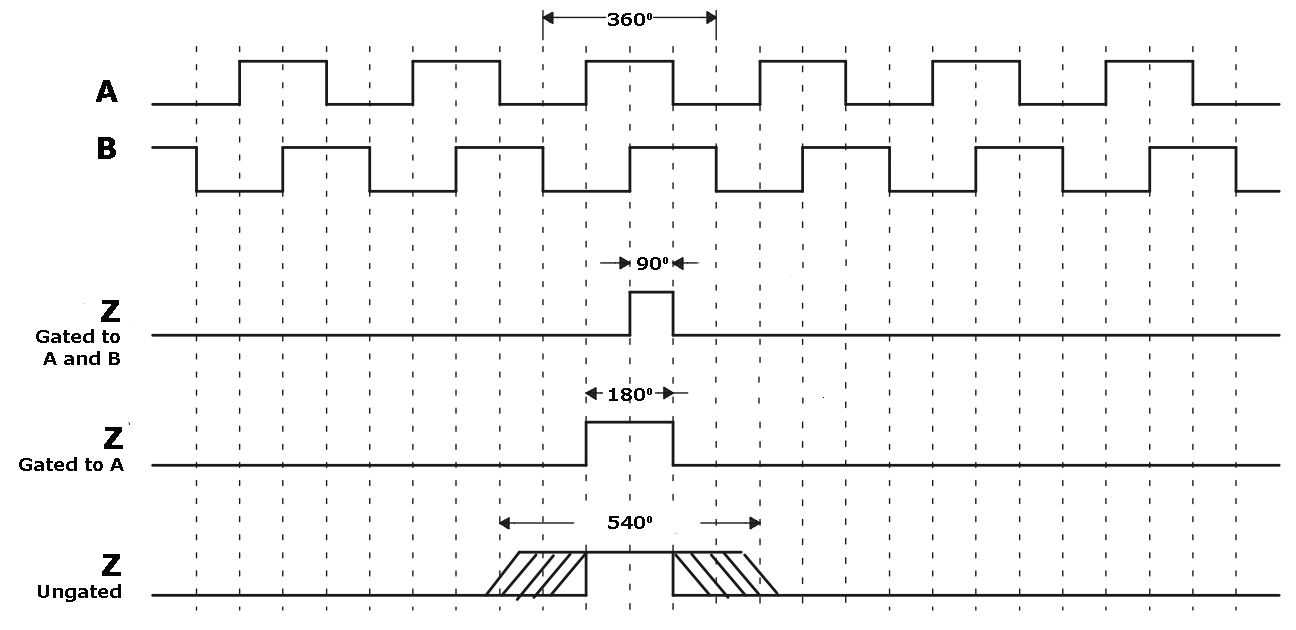
Image credit: Texas Instruments
Index pulses that are gated to either the A or B channel have a width of 180 electrical degrees. This is referred to as half-cycle gating (with a full cycle being 360 electrical degrees). While the index pulse can be gated to either the high or the low state of the A or B channel, it is most often gated to the high state (A high or B high).
Similarly, index pulses that are gated to both the A and B channels in their high state (or to both the A and B channels in their low state) have a length of 90 electrical degrees. This is referred to as quarter-cycle gating.
Whether an index pulse is ungated, half-cycle gated, or quarter-cycle gated depends on the encoder model. And while gating improves the accuracy of the index pulse — and in turn, the home or reference position — it requires that the servo drive or controller be able to read the Z channel at a rate fast enough to detect the pulse with every revolution of the encoder.
Leave a Reply
You must be logged in to post a comment.