
Fast-paced warehouse operations demand extensive automation, which is inconceivable without micromotors. Faulhaber weighs in on intralogistics robots and how drive system capabilities influence their design.

Modern intralogistics technologies place high demands on drive systems. In many instances, drives must release tremendous force in confined spaces and perform precise positioning tasks in continuous or stop-and-go operations. Speed is also essential, as many thousands of orders must be processed daily.
To speed up warehouses, automatic storage and retrieval machines, driverless transport systems, and intelligent logistics robots are taking over an increasing number of work steps in storing, retrieving, and preparing items for dispatch. Flexible systems that work reliably around the clock keep operations moving cost-effectively and are often driven by high-performance micromotors. Small motors are crucial for controlling robot movements, enabling them to navigate environments, manipulate objects, and perform various tasks. Examples of how motors are used in warehouse robots include:
- Wheel propulsion: Mobile robots employ motors to drive their wheels or tracks. By controlling the speed and direction of the wheel motors, the robot can move forward, backward, turn, or navigate in different directions.
- Steering: Motors are used for steering mechanisms in robots with multi-directional capabilities. By controlling the rotation of the steering motors, the robot can change its direction of motion or perform complex maneuvers.
- Actuation: Motors can act as actuators to perform various tasks. For example, they can be used in robotic arms for grasping, lifting, or manipulating objects. They can also extend or retract appendages, open and close doors, or operate other mechanical components.
- Sensors and feedback control: Encoders or other position sensors can be attached to the motors to provide feedback on their speed, position, or torque. The control system uses this feedback to adjust and regulate the motor’s behavior, ensuring accurate and precise movement.
- Balance and stabilization: By controlling the torque and movement of the motors, robots can maintain balance and stability while navigating uneven terrain.
- Obstacle avoidance: Motors can be combined with sensors to prevent collisions. The sensors detect obstacles or proximity to objects, and the motors are controlled to steer the robot away from potential hazards.
“Intralogistics robots work in dynamic environments where they must recognize and avoid obstacles and ensure safe cooperation with other robots and human workers. They need to be flexible and adapt to changing processes and the goods they handle,” said Kevin Moser, business development manager at Faulhaber.
Faulhaber engineers address challenges that modern warehouses face by evolving drive systems to match the industry’s shrinking need — the need for smaller, more powerful motion control components that reduce weight and improve speed.
Motion control for the modern robot
Autonomously driving and self-contained logistics robots are critical to “Intralogistics 4.0.” They are used for storage, removal, and dispatch preparation to optimize material flow, relieve employees, and replace conventional lift or pallet trucks.
For example, autonomous picking robots allow precise handling of individual objects. A typical picking robot comprises a lifting column, gripper, and a drive unit — perhaps a Faulhaber BX4 series brushless dc servomotor with an integrated motion controller and planetary gearhead. When used in the gripper, this combination ensures precise positioning during storage or retrieval, all during continuous operation with constant load changes. Yet the complete drive unit weighs only about 300 g and doesn’t require a counterweight even when the gripper fully extends.
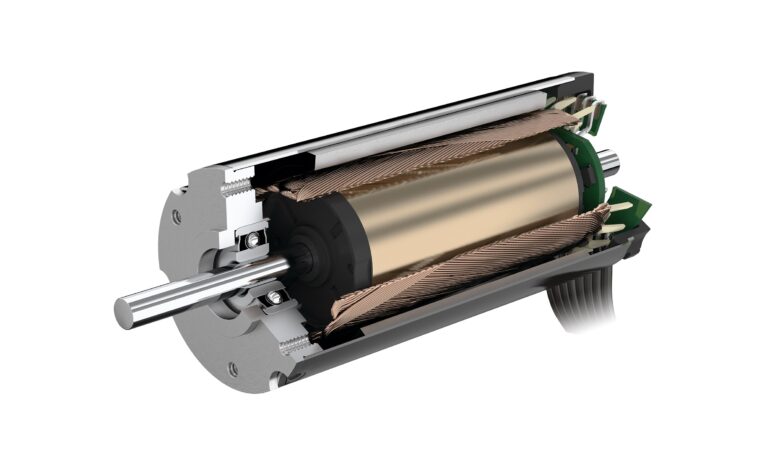
The brushless dc servomotors are compact, with a diameter of only 32 mm and a length of 85.4 mm. This small size makes it possible to design a very flat gripper that can pick up packages stored just above the ground, making optimal use of expensive storage areas. With the brushless commutation system, the motors are long-lasting, deliver high torques, and run quietly with a balanced rotor. Integrated current control limits torque demands and protects the drive against overload.
“Robot design needs to be robust, lightweight, and very compact, resulting in low maintenance, low power consumption but high efficiency for extended battery life and minimum downtime,” said Moser. “Modularity is also important: As operations expand in a modular system, it is easy to add additional robots.”
Graphite-commutated dc micromotors of the CXR series combined with matched gearheads have also proven themselves in handling tasks. Their commutation system is well suited for dynamic, high-performance applications with fast start-stop operations required in many handling systems and automatic sorting, such as where switches are used to change routes on transport paths.
With their linear characteristics, the dc motors are easy to control. Combined with high-resolution encoders, they are ideal for precise positioning tasks. High-quality neodymium magnets and Faulhaber winding ensure high-power density in a compact design. The motors can be installed directly in handling elements and lift considerable weight despite their small size.

“As the degree of automation of intralogistics processes throughout the entire value chain increases, robots must be more autonomous, intelligent, and interconnected. Requirements regarding the speed and dynamics of the systems are increasing as well. This requires the robots to have reliable, safe, and smart sensor and drive system technology to adapt to these changing conditions,” said Moser.
Warehouses often choose automated guided vehicles (AGVs) for flexible transport within a facility. Availability, speed, flexibility, and small size are essential requirements for these transport systems’ drives. Current consumption also plays a role in ensuring that AGV batteries are as long-lasting as possible. For example, brushless dc servomotors of Faulhaber’s BP4 series drive the wheels, whereby the motor power transfers to the wheels via planetary gearheads and drive belts. High-efficiency motors with innovative winding technology allow for a high copper content that minimizes losses.
Encoders of the IE3-1024 series are built right onto the servomotors for precise position detection. The magnetic incremental encoders feature an indexing channel for referencing a drive shaft revolution and a standardized, electronic encoder interface. The resolution, direction of rotation, index width, and index position can be adapted to the application, and a motion controller controls the servomotors. Such drive systems are also used for mobile robot platforms, which move autonomously in facilities without preinstalled guidance systems.
Micro-fulfillment seeks even smaller tech
Warehouse robots continuously become more autonomous in navigating complex environments, adapting to dynamic surroundings, and making real-time decisions. Improved motion control and sensing systems, advanced algorithms, and artificial intelligence enhance their independence, increasing efficiency and productivity. And as the trend of micro-fulfillment increases, so will demand for even more compact but powerful drive systems.
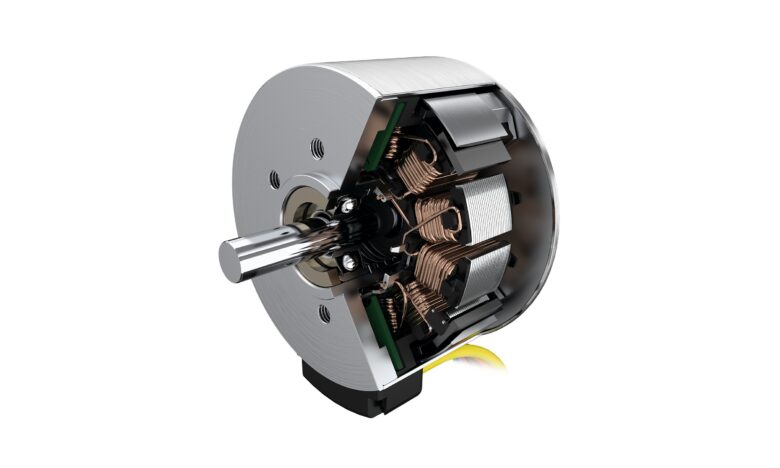
For example, high-torque flat motors of the BXT series are useful for wheel drives when installation space is limited in the axial direction. These motors are 14, 16, and 21 mm long but deliver torques up to 134 mN-m within diameters of 22, 32, and 42 mm, respectively. For precise speed control or strict positioning accuracy requirements, diameter-compliant magnetic encoders or speed controllers are fully integrated into the housed motor variants, expanding the drive by a mere 6.2 mm.
“High efficiency, high power density, and overload capability will be key,” said Moser. “The more compact the drive system, the more space is left for the battery system, and the highest power-to-weight ratio enables increased payload weight per shuttle.”
Faulhaber
faulhaber.com/logistics-robot/en


Leave a Reply
You must be logged in to post a comment.