
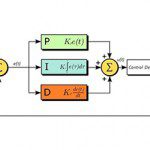
Servo tuning can be accomplished by several methods, but the most common way is to use a PID algorithm. The PID algorithm uses three feedback gains—proportional gain, integral gain, and derivative gain—to compare the commanded position (or velocity) with the actual value and issue commands to correct errors between the two. Feedback gains determine how […]
Continue to Site