Dither is one of several terms used to describe small, rapid, back-and-forth movements of an object. Depending on the context, when the term “dither” is used in motion control systems, it can refer to purposeful, commanded movements or to unintended, unwanted motion.
Image credit: Dr. James Hedberg, CUNY
In some motion systems, dither is purposely induced to reduce the effects of friction, or more specifically, stick-slip. When two objects begin to move relative to one another, the static friction encountered during the start of motion is higher — often significantly higher — than the dynamic friction that occurs once movement has been initiated. This leads to a phenomenon known as stick-slip, or stiction, which causes jerky, uneven motion.
Forcing an object to dither — that is, to make very small oscillatory movements — keeps the object in the realm of dynamic friction, avoiding the transition between static and dynamic friction and reducing or eliminating stiction. Dither is often used for the control of valves, and in servo-controlled motion systems, a dither signal can be added to the control command to ensure very smooth motion, especially at slow speeds.
Image credit: Parker
Similarly, some stepper piezo motors (also referred to as “walking” piezo motors) have an operating mode known as dithering. In this mode, they can provide very small movements — in the nanometer or picometer range in some cases — at high frequency.
However, dither can also refer to unwanted movements of a linear or rotary system as it oscillates between two encoder counts. This can occur in servo systems when the control commands the system to move to a position located at a non-integer encoder count, or pulse. In other words, if the controller commands the system to move to a position that corresponds to an encoder count of 9.88, the system will oscillate, or dither, between encounter counts 9 and 10. To avoid dither in this scenario, the encoder should have a higher resolution than the required positioning accuracy of the motion system.
It’s important to note that the terms “hunting” and “dithering” are sometimes used interchangeably. However, hunting is an undesirable result of a servo system attempting to correct an error between the commanded position and the actual position.
Hunting can be exacerbated by the controller’s gain settings — particularly the integral gain, which increases over time to force the system to zero positioning error at the end of the move. However, the error is constantly varying, so the system must react rapidly to implement corrective moves before the position changes again. But any lag between the detection of the position error and the corrective move can cause the system to overshoot the target position, causing an error in the opposite direction. Now the system must initiate a corrective move in the reverse direction, but overshoots again due to the integral gain. This cycle of oscillation around the desired position is referred to as hunting.
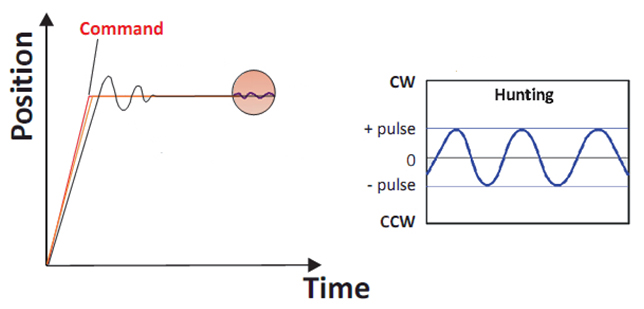
Image credit: American Motion Technology
Leave a Reply
You must be logged in to post a comment.