
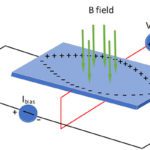
The Hall effect is an outcome of the Lorentz force at work. When a thin conductor (or semiconductor) has a steady flow of current running through it and a magnet is placed so that its magnetic field runs perpendicular to this current, the magnetic field of the current reacts to the magnetic field of the […]
Networking + IoT
What is Single Pair Ethernet (SPE) and how is it used in industrial applications?

Single Pair Ethernet (SPE) is a technology that provides Ethernet transmission over a single pair of copper wires, while also transmitting power to connected devices via Power over Data Line (PoDL). Single Pair Ethernet was initially developed to meet the demands of the automotive industry — smaller, lighter cables and connectors for transmitting data from […]
POSITAL precision magnetic encoders now with BiSS-C communications interface

POSITAL’s IXARC high-precision magnetic absolute rotary encoders will be available with a BiSS-C interface. Encoders with this interface are ideal for commutation and position feedback on brushless dc servo motors and are also a good fit for motion control applications, such as medical equipment. They feature robust design, 17-bit resolution and good dynamic response (up […]
Robotic bartender powered by Arduino-compatible controller and BLDC servo motors
Teknic’s Robotic Bartender uses one of Teknic’s new ClearCore controllers (Arduino compatible) and six ClearPath integrated servo motors. A small team of engineers were challenged to demonstrate the flexibility and power of the new controller. They came up with a robotic bartender that lets you order one of 130,000 possible drink combinations for the perfect […]
Trends: Sensors on the front lines of changing industrial world
Sensors play a key role in many types of automation systems and machines, helping ensure they perform at their optimal level. Sensors are also at the core of the trend for increased condition monitoring and the larger program of predictive maintenance, which aims to reduce or eliminate sudden and catastrophic machine failure by actively monitoring […]
Teknic launches new EtherNet/IP Motion and I/O Controller
Teknic recently launched ClearLink, a Motion and I/O Controller offering users of EtherNet/IP compatible PLCs, such as CompactLogix, MicroLogix, and ControlLogix. It provides a new way to save space, money, and wiring in automated machinery. ClearLink provides 4 axes of motion control, a serial port, 13 configurable digital & analog I/O points, and expandable I/O […]
Building IoT into new machines

With IoT-capable hardware and software readily available, engineers are seeing the benefits of including IoT functionality into new machine designs by default. Rich Carpenter Silvia Gonzalez Emerson Rapid developments in the consumer electronics realm have become a general expectation of users everywhere, with vendor releases each year predictably topping previous iterations for performance, features, and […]
What is AS-I Safety and what are its benefits for motion systems?
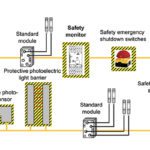
When sensors, actuators, and other lower-level components are used in a functional safety capacity, AS-Interface Safety at Work offers a simple, efficient, bus network for monitoring these safety devices — alongside standard, non-safety devices — on the AS-Interface cable. Recall that actuator-sensor interface (AS-Interface, or simply AS-I) is a master-slave bus that operates at the […]
The benefits of integrating vision into machine control
Scalable PC-based automation, robust network solutions and open camera standards allow machine vision to ditch black boxes and increase throughput. Daymon Thompson U.S. Software Product Manager Beckhoff Automation LLC Machine vision has become indispensable for many tasks in quality inspection, track-and-trace and more. As costs decrease and capabilities increase, practically any machine in any industry […]
BG series of Dunkermotoren now available with integrated PROFINET interface
Modern machines and devices use all available process data to optimize them and make them transparent. PROFINET as a communication standard is ideally suited for this. Dunkermotoren early on integrated PROFINET functionality, including the PROFIdrive profile with application classes 1 and 4, into motors as standard. This offers PROFINET users significant advantages in cabling, commissioning […]