
Encoders are at the heart of any closed loop servo system, providing feedback to the controller, which uses this information to determine if the motor reached the commanded position or velocity. Thus, encoder resolution and accuracy are essential to the proper operation of a closed-loop system.
Resolution is the distance over which a single encoder count takes place – it’s the smallest distance the encoder can measure. For rotary encoders, resolution is typically specified in terms of measuring units, or pulses, per revolution (PPR). Linear encoder resolution is most commonly specified as the distance over which the count takes place and is given in terms of microns (μm) or nanometers (nm). The resolution of an absolute encoder is specified in bits, since absolute encoders output binary “words” based on the encoder’s position.
A bit is a binary unit: 16 bits equals 216, or 65,536. Therefore, a 16 bit encoder provides 65,536 counts per revolution.
Accuracy is the difference between the true position (or speed) of the device being measured and the position (or speed) reported by the encoder. For rotary encoders, it is specified in arcseconds or arcminutes, and for linear encoders accuracy is typically given in microns.
Another term sometimes used in reference to encoder performance is “error.” Error is essentially the inverse of accuracy. In other words, accuracy specifies how close the encoder reading is to the true position, where error specifies how far the encoder is from the true position.
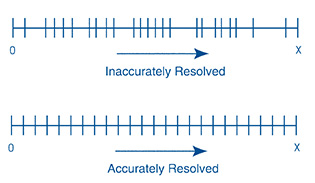
Image credit: Dynapar
It’s important to note that higher resolution does not mean higher accuracy. Consider two encoders – one with 100 PPR resolution and one with 10,000 PPR resolution, but both with the same accuracy specification. The lower resolution (100 PPR) encoder can report a movement of 90 degrees just as accurately as the higher resolution (10,000 PPR) model. The higher resolution encoder just has the ability to break up that 90 degree movement into much smaller increments.
Factors that affect resolution
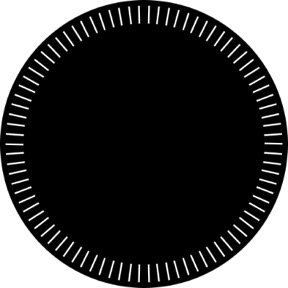
An encoder’s resolution is based on the number of lines (for an incremental encoder) or the pattern (for an absolute encoder) on the encoder disk or scale. Physically, resolution is fixed. Once an encoder is manufactured, there is no option to add more lines or patterns to the code disk. But the resolution of an incremental encoder can be increased through signal decoding. Incremental encoders output square wave signals, and by counting both the leading and trailing edges of one signal (signal A), the resolution of the encoder is doubled. When the leading and trailing edges of both signals (A and B) are counted – referred to as quadrature decoding – resolution is increased by a factor of four.
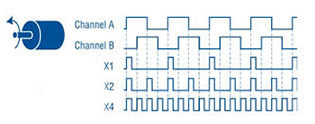
Image credit: Danaher
Don’t confuse resolution with repeatability. Repeatability is the ability of the encoder to consistently make the same measurement and get the same result. It is typically specified as a multiple of the encoder’s accuracy, and is often 5 to 10 times better (smaller) than accuracy. Repeatability is an important specification for applications that perform repetitive tasks, such as assembly or pick-and-place processes.
Factors that affect accuracy
While the number of lines or measuring units determines resolution, accuracy is affected by the width and spacing of these lines or units. Inconsistent width and/or spacing will cause errors in the timing of the pulses. For absolute encoders, accuracy is influenced by the precision with which the pattern is placed on the code disk.
Factors external to the encoder can also affect its accuracy. These include the rigidity of the assembly and mounting errors, such as a lack of concentricity between the encoder disc and the shaft to which it’s mounted. For linear encoders, thermal expansion of the scale and of the mounting surface can also degrade accuracy.



Leave a Reply
You must be logged in to post a comment.