Applications that use closed-loop control often require communication networks that provide deterministic, real-time control of data transmission. This means the network guarantees that a message will be transmitted, or an event will be responded to, in a specified, predictable period of time — not faster or slower (deterministic) — and that the message will be transmitted or the event will be responded to within a maximum amount of time (real-time). To meet these requirements, the network must have low latency and an acceptable amount of jitter.
Latency
Latency is the amount of time required for a message (packet) to travel from the source to the destination. Transmission delays can introduced by physical components of the network, such as cables and switches, as well as delays caused by routing through electrical and electronic pathways. Although minimizing latency in motion control networks is ideal for precise control, some amount of latency can often be dealt with, as long as it is known and consistent.
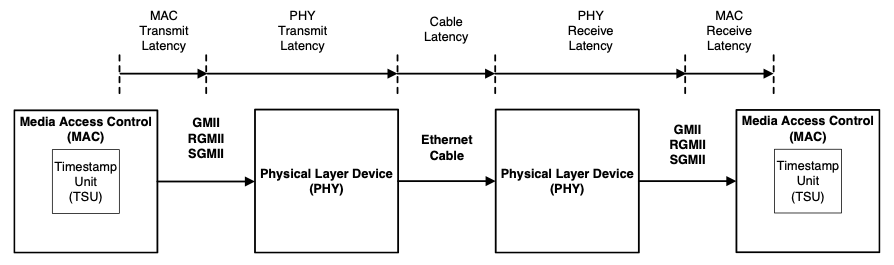
Image credit: Texas Instruments
Jitter
Variation in latency is referred to as jitter, although strictly speaking, jitter is the variation in latency above the upper limit. Jitter causes the delay between messages, or data packets, to be inconsistent (also referred to as delay variability). This means that packets can arrive at the destination in the wrong order or in “groups” that cause delays in processing. An everyday example of jitter is choppy audio or video on a conference call, which is caused by the irregular transmission of packets that contain the audio or video data.
In motion control applications, where the output of a message controls a process, jitter can be even more critical to the application than the network’s speed.
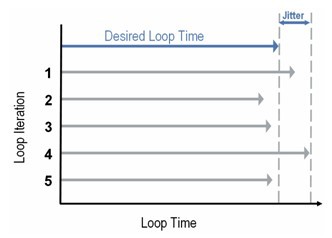
Image credit: National Instruments
Most Industrial Ethernet networks claim jitter of less than 1 μs, although real-world performance can be affected by factors such as the amount of jitter inherent in other network devices and the number of cascaded devices the packet must pass through. To achieve low jitter, EtherCAT and EtherNet/IP (via the CIP Sync extension) use time synchronization techniques based on IEEE 1588, while PROFINET IRT, Ethernet POWERLINK, and SERCOS III use principles of isochronous data transmission.
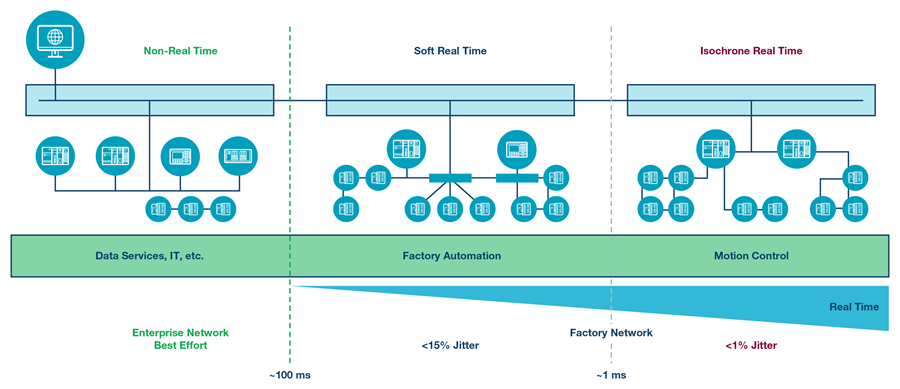
Image credit: Analog Devices
Even though each of these networks provides deterministic communication with guaranteed latency and low jitter, because they use slightly different methods for data transmission and time synchronization, the networks aren’t compatible. But a new set of standards, referred to as time-sensitive networking (TSN) and maintained by the IEEE 802.1 task group, aims to ensure compatibility between the different Industrial Ethernet protocols by standardizing the methods used for time synchronization and traffic management.
Leave a Reply
You must be logged in to post a comment.