
There are two fundamental types of stepper motor drives: constant voltage drives, which supply a fixed voltage to the motor, and constant current drives, which manipulate voltage to ensure that a constant current is delivered to the motor.
Stepper motor electrical basics
The most fundamental equation governing the behavior of a stepper motor is Ohm’s law, which states that current is proportional to voltage and inversely proportional to resistance.
![]()
The rise time of the current (how long it takes current to build in the motor windings) is proportional to voltage and inversely proportional to inductance:
![]()
The supply voltage required for a moving stepper motor depends on the motor’s rotational speed, the required current to the motor, the resistance and inductance of the motor, and the rise time of the current.
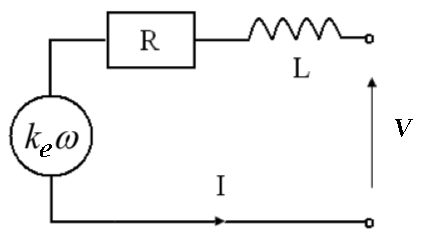
![]()
Where:
V = supply voltage
Ke = back EMF constant
ω = rotational speed
I = required current
R = resistance
L = inductance
dI/dt = rate of change of current with time
The first factor in the voltage equation, Keω, represents the voltage required to overcome the back EMF, which is voltage produced as the motor turns, opposing the supply voltage.
The second factor, IR, represents the voltage required for current production.
The third factor, L(dI/dt) represent the voltage required to establish or change the current level.
Constant voltage vs constant current
When using a constant voltage drive, the supply voltage is matched to the motor’s rated voltage and is held constant. Constant voltage drives are simpler and less expensive than constant current drives, which adjust the supply voltage to ensure that a fixed, constant level of current is provided to the motor. With a constant voltage drive, the resistance of the drive circuit limits the maximum current, while the motor’s inductance limits how quickly the current rises. At low speeds, resistance is the limiting factor in current (and, therefore, torque) production. The motor operates smoothly with good torque and positioning control.
Constant voltage drives are most often used with unipolar stepper motors.
However, as motor speed increases, inductance and current rise time (dI/dt) begin to prevent the current from reaching its target value. Also, as motor speed increases, so does back EMF, meaning that more of the supply voltage is being used just to overcome this back EMF voltage. Thus, the main drawback of a constant voltage drive is a rapid drop-off in torque production at relatively low motor speeds.
Following Ohm’s law, increasing the resistance in the circuit (typically via external resistors) will allow the drive to produce more current with the given supply voltage. However, resistance causes motor heating and decreases efficiency. Another option when using a constant voltage drive is to use a supply voltage higher than the motor’s rated voltage — but this can only be done for very short duty cycles to ensure that the motor “off” time (when no power is supplied) is sufficient to prevent damage due to heat. In most cases, if a more torque is required at higher speeds, a constant current (aka “chopper“) drive is the best option.
Constant voltage drives are also referred to as “L/R drives,” in reference to the motor’s electrical time constant, τe. The time constant is the ratio of inductance to resistance (L/R) and indicates the amount of time required for current in the motor winding to reach 63 percent of its rated value.



Leave a Reply
You must be logged in to post a comment.