
Safe Torque Off (STO) is the most basic of the drive-based safety functions, producing an uncontrolled stop, in accordance with the standard EN/IEC 60204-1. The STO function is suitable for systems with low inertia or high friction that will stop in a relatively short amount of time when power is removed from the motor, and when the time to come to a complete stop is not critical to safety.
But for systems with high inertia or low friction, or where the time to achieve a complete stop is critical, there are other safety functions – referred to as Safe Stop 1 (SS1) and Safe Stop 2 (SS2) – that stop the system in a pre-determined, controlled manner.
Safe Stop 1
Safe Stop 1 employs a pre-defined deceleration profile (typically a fast ramp-down) to safely stop the motor. In other words, it allows the drive to continue supplying power to the motor in order to achieve a controlled stop. Once the motor is at a standstill, the STO function is enabled, which removes power to the motor and ensures that the motor cannot be accidentally restarted. The SS1 function overrides all other functions, except STO. SS1 is often used for equipment such as large fans, saws, and spindles that have very high speed or inertia.
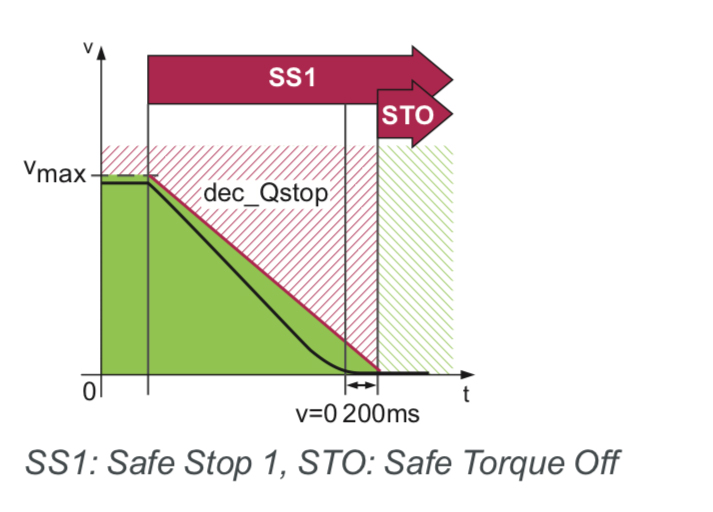
Image credit: Schneider Electric
Safe Stop 2
Safe Stop 2 is much like SS1 in that it maintains power to the motor in order to bring it to a controlled stop according to a pre-defined deceleration profile. The difference lies in what happens after the motor has reached standstill. When the SS2 function is executed, power is not removed from the motor after standstill is reached, and the STO function is not enabled. Instead, power continues to be supplied to the motor in order to hold the load at the standstill position, through the use of the Safe Operating Stop (SOS) function. SOS is a type of “safe standstill monitoring,” where the motor provides holding torque and the position of the motor is continuously monitored. This is most applicable in vertical applications, where removal of power to the motor would allow the load to fall.
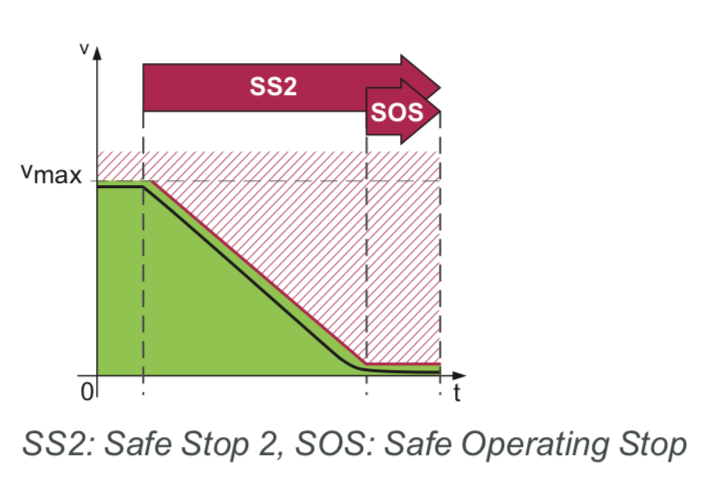
Image credit: Schneider Electric
Safety functions for emergency stops
 According to IEC 60204-1, an emergency stop can operate as either a stop category 0 or a stop category 1. Stop category 0 requires that power to the motor is removed immediately upon activation. It also requires that the safety function must override all other operations and functions, and that a restart be possible only after a manual reset. The STO safety function fulfills the requirements for stop category 0.
According to IEC 60204-1, an emergency stop can operate as either a stop category 0 or a stop category 1. Stop category 0 requires that power to the motor is removed immediately upon activation. It also requires that the safety function must override all other operations and functions, and that a restart be possible only after a manual reset. The STO safety function fulfills the requirements for stop category 0.
Stop category 1, per IEC 60204-1, requires that power be supplied to the motor during the shut-down and removed only when the shut-down has been completed. Like stop category 0, stop category 1 requires that the emergency stop function override all other operations and functions and that a restart be possible only after a manual reset. The SS1 function fulfills the requirements for stop category 1.
The SS2 safety function fulfills stop category 2 per IEC 60204-1 – a controlled stop with power available to maintain the motor position – but it is not suitable for an emergency stop device.






Leave a Reply
You must be logged in to post a comment.