With each discrete step that a stepper motor makes, the inertia of the system causes the motor to slightly overshoot (or undershoot) the intended step angle. The motor then oscillates, or “rings,” until it finally settles at the commanded position. If the frequency of these step-by-step oscillations is at or near the motor’s natural frequency, the motor’s settling time will increase and vibrations and audible noise can occur. This is referred to as resonance, and if it becomes severe, it can cause the motor to lose steps or even stall.
All objects have a natural, or resonant, frequency at which the object vibrates in the absence of any damping force. For a classic spring-mass system, the resonant frequency is a function of the spring constant and the mass.
![]()
ω0 = resonant frequency of a spring-mass system (rad/s)
k = spring constant (N/m)
m = mass (kg)
For a stepper motor system, the resonant frequency is a function of the motor’s torque constant and the system inertia. (Note that the motor’s resonant frequency is a function of the rotor inertia, but in stepper motor systems, it’s the inertia of the motor-load combination that’s important.)
![]()
ω = resonant frequency of a stepper motor system (rad/s)
K = torque constant (Nm)
J = system (motor + load) inertia (kgm2)
There are several methods to reduce resonance in a stepper motor system, with the simplest method often being to change the system’s inertia. There are two ways a user can do this — by adding a mechanical damper between the motor and the load or by adding a gearbox to the system.
Mechanical dampers for stepper motors range from simple elastomer rings that absorb and dissipate vibration energy, to tuned mass dampers, which are designed to match and counter the natural frequency of the system.
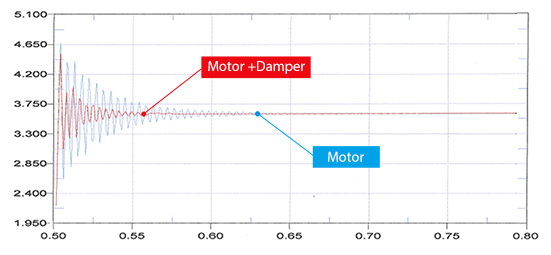
Image credit: Moons’
The addition of a gearbox provides two benefits. First, it decreases the total system inertia by decreasing the load inertia. (Recall that when a gearbox is used, the load inertia is divided by the square of the gear ratio). And when power is transferred from the motor through a gearbox, the motor has to rotate faster for a given output speed to the load, so there’s less chance that the motor will operate at or near its natural frequency.
The stepper drive’s control method can also affect the amount of vibration that the motor experiences. Case in point, operating a motor with microstepping control gives the benefit of smaller torque variance with each step, since the build-up and decay of current in the windings is more gradual. Even though overshooting (or undershooting) is still possible with microstepping, it will be less significant than with full-step operation, so settling time and vibrations will be lower.
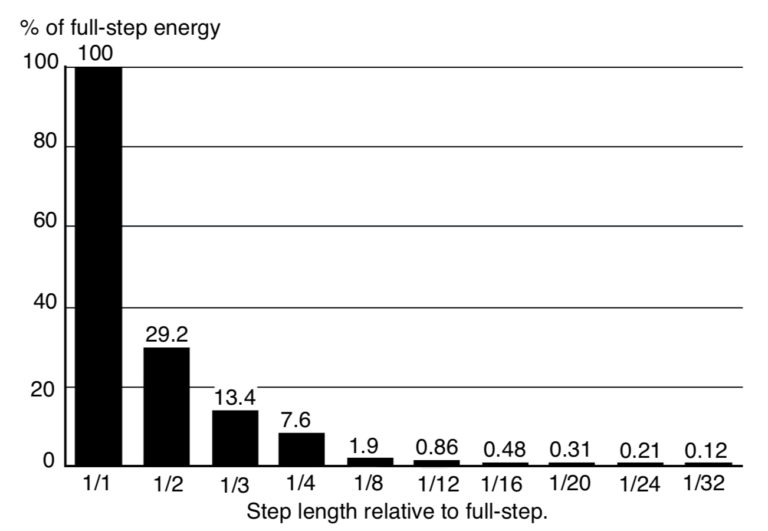
Image credit: New Japan Radio Co., Ltd.
Five-phase stepper motors also have smaller step angles than typical 2-phase motors. As with microstepping, the smaller step angle means less current is required for each step, so any vibrations that occur are less severe. And with more phases (five versus two) contributing to output torque, the motor experiences lower torque ripple, and in turn, fewer vibrations.
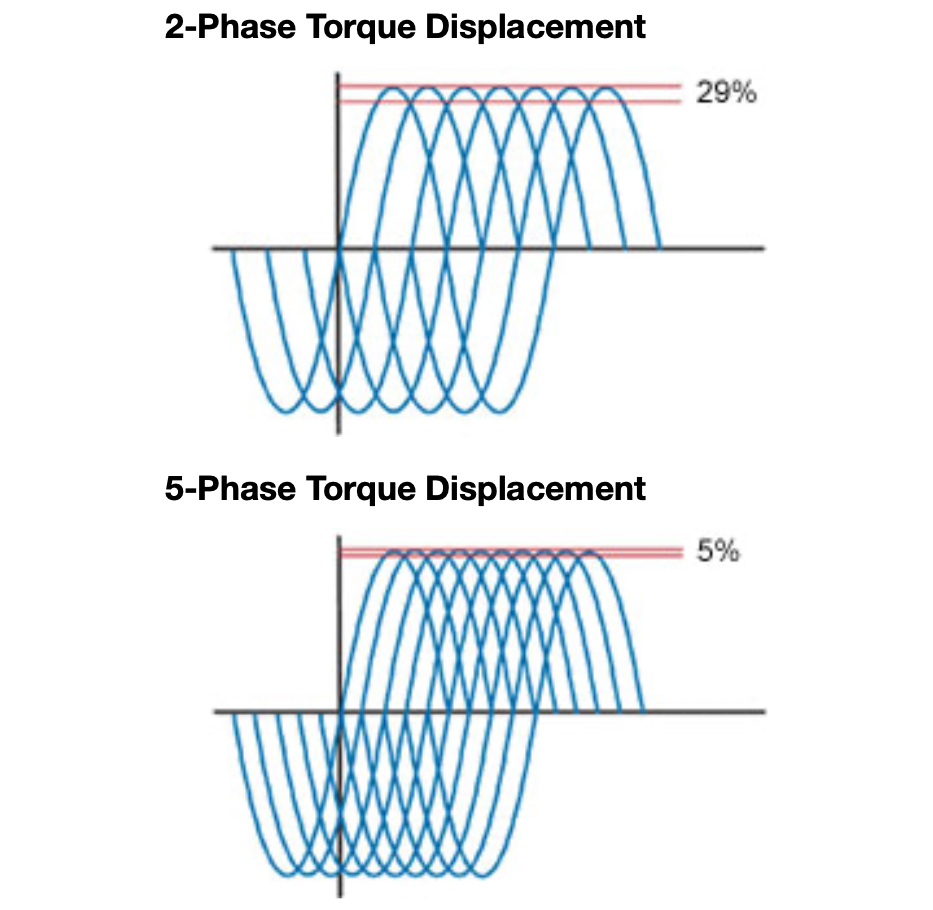
Image credit: Oriental Motor
From a manufacturing standpoint, a stepper motor’s tendency to vibrate can be reduced by changing the rotor inertia (through material or design changes) and by altering the size of the air gap between the motor and stator, which in turn, changes the motor’s torque stiffness. Manufacturers also offer stepper motor drivers that monitor and precisely control current in the motor windings to provide smooth operation, minimize vibrations, and avoid resonance.
Leave a Reply
You must be logged in to post a comment.