
An integral horsepower gearmotor is any motor with a horsepower of 1 and above, as opposed to fractional horsepower motors that are less than 1 hp. The design considerations for integral horsepower motors are going to be fairly similar to fractional horsepower motors because the same types of parameters are important. So for instance, torque […]
FAQs + basics
What is a wound rotor motor?

A wound rotor motor is a variation of the three-phase induction motor, designed to provide high starting torque for loads with high inertia, while requiring very low current. Wound rotor motors are also referred to as “slip ring motors.” The stator of a wound rotor motor is the same as a typical induction motor, but […]
What is EtherCAT?

Ethernet for Control Automation Technology (EtherCAT) was developed by Beckhoff. It’s based on the CANopen protocol and on Ethernet but differs from internet communication or network communications in being specifically optimized for industrial automation control. The standards are defined and maintained by the EtherCAT technology group. Using the OSI network model, Ethernet and EtherCAT rely […]
What is hot swapping in PLC systems?

For computer systems in general including PLCs, hot swapping refers to the process of adding or replacing components in a control system or a PLC without having to shut down power to the system. In a PLC, this typically refers to I/O modules that plug into the PLC chassis. For PLCs that don’t have hot […]
What is linear behavior for DC motors?
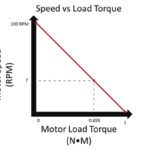
When the term “linear behavior” is used to describe a system, it implies that the system’s output is directly proportional to the input. Unlike their wound-field counterparts, permanent magnet DC (PMDC) motors exhibit linear behavior. The use of permanent magnets means PMDC motors don’t need separate field excitation, and therefore, don’t experience the electrical losses […]
What are auto-tuning methods for servo drives?

Tuning a servo system is a complex and iterative process. It typically requires tuning multiple control loops, each with its own gains (proportional, integral, and/or derivative) to be adjusted. In addition, tuning a servo drive usually requires adjustments to additional parameters including acceleration and velocity feed-forward gains and filters to reduce oscillations. While manual tuning […]
What are gearmotors used for speed-control applications?

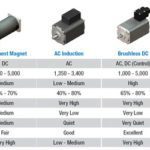
Aside from their use in position control applications, gearmotors are used in speed-control applications as well. The reality is that many different types of gearmotors can be used for speed control. As with any design problem, the requirements of the unique application will dictate what type of motor is best suited for the job. A […]
Where are digital servo drives used?
The original servo drives are analog types that operate on ±10-Volt inputs. In contrast, digital servo drives operate over fieldbus networks that now dominate the market. The primary difference in construction between digital and analog drives is that a digital drive includes a microprocessor to carry out computations — in turn to determine the output […]
Where are analog servo drives used?
The purpose of a servo drive is to convert low-power signals from the controller to high-power signals to the motor, instructing it to produce the desired torque or velocity. Servo drives (also referred to as servo amplifiers) can operate on either analog or digital input signals. Analog servo drives receive ±10-Volt analog signals from the […]
What do PLC watchdog timers do?
Basically, the function of a watchdog timer is to make sure that some processing malfunction does not shut down the entire system. Examples of malfunctions can be hardware failures or a program error that may, for instance, send the program into an infinite loop. In PLCs, watchdog timers are typically involved with the program scan […]